Zapoznaj się z naszymimateriałami na stronie



Wprowadzenie
mBot 1 to robot edukacyjny zaprojektowany przez firmę Makeblock, specjalizującą się w tworzeniu zestawów robotów edukacyjnych, służący do nauki robotyki i programowania. Cieszy się on szczególną popularnością w gimnazjach jako narzędzie do nauki programowania w języku Scratch.
Dzięki naszemu oprogramowaniu AlphAI nauczyciele mogą teraz przybliżać uczniom temat sztucznej inteligencji i pomagać im w jej zrozumieniu.
W ramach naszych zajęć będziecie mieli okazję trenować modele sztucznej inteligencji w ramach uczenia nadzorowanego lub uczenia opartego na wzmocnieniu, aby wykonywać bardziej złożone zadania za pomocą robota mBot 1.
UWAGA: Oprogramowanie AlphAI jest kompatybilne z robotem mBot 1, ale nie jest jeszcze dostępne dla robota mBot 2.
Skład

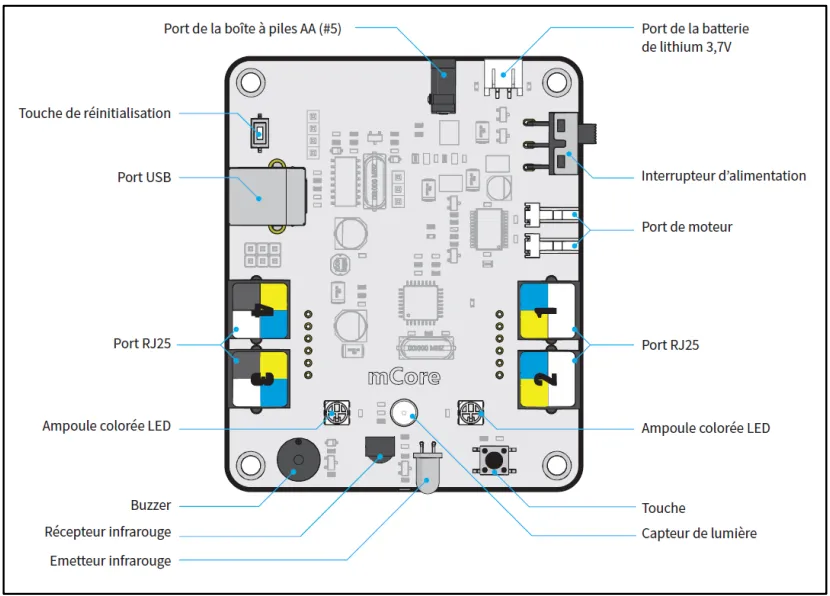
Robot składa się z różnych czujników, które można zamontować na robocie mBot.
Czujniki
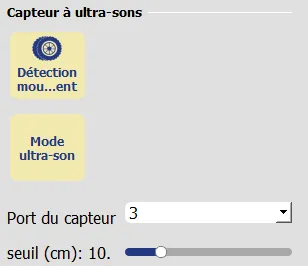
- Czujnik ultradźwiękowy i czujnikruchu
Ultradźwięki: umożliwia korzystanie z czujnika ultradźwiękowego umieszczonego z przodu robota. Przekazuje on wartość zależną od wykrytej odległości.
Dostępne są 3 tryby pracy:
- odległość od przeszkody: zwracana wartość to odległość od przeszkody mierzona w metrach.
- odległość od przeszkody: zwracana wartość jest odwrotnie proporcjonalna do zmierzonej odległości.
- Obecność/brak przeszkody: czujnik zwraca wartość 1, jeśli wykryje przeszkodę, a 0 w przeciwnym razie. Zasięg wykrywania przeszkód można regulować za pomocą suwaka poniżej.
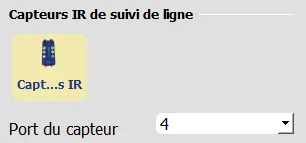
- Dwa nadajniki/odbiorniki podczerwieni
- Kamera (opcja)

Akcje
Funkcje dostępne w programie to:

Można również utworzyć akcję niestandardową, klikając przycisk:

Pojawi się wtedy następujące okno:

Nadaj nazwę akcji i zaznacz opcję „akcja robota”, aby zmienić ustawienia: nowa akcja jest już dostępna.
Aby zapisać tę konfigurację i móc z niej skorzystać w przyszłości, kliknij Plik > Zapisz > Zapisz konfigurację.
Warunki użytkowania
Zalecamy korzystanie z mBot 1 na arenie AlphAI.
Brak ścian ogranicza zakres dostępnych ćwiczeń.
W przypadku niektórych ćwiczeń wystarczy jednak po prostu poruszać mBotem po płaskiej powierzchni.
Aby wykonać wszystkie ćwiczenia dostępne w oprogramowaniu, mBot 1 będzie potrzebował:
- Bardzo równa powierzchnia. Najlepiej użyć białej plandeki.
- Ściany wyższe od robota
- Jedna lub kilka linii na podłożu w kolorze silnie kontrastującym z plandeką (można użyć czarnej taśmy klejącej)