Zapoznaj się z naszymimateriałami na stronie



Materiały:
- Co najmniej 1 robot
- 1 komputer/robot
- Płaski teren
Ustawienia:
- Uczenie nadzorowane – śledzenie linii
Czas trwania:
1 godz. 30 min (2 x 45 min)
Wiek:
od 8 lat
Polecane do odkrywania poprzez zabawę
Naucz swojego robota, jak reagować w konkretnych sytuacjach!
Dzięki temu ćwiczeniu dowiesz się, jak skonfigurować oprogramowanie AlphAI i jego sieć neuronową, aby sterować robotem mBot w prostym środowisku.
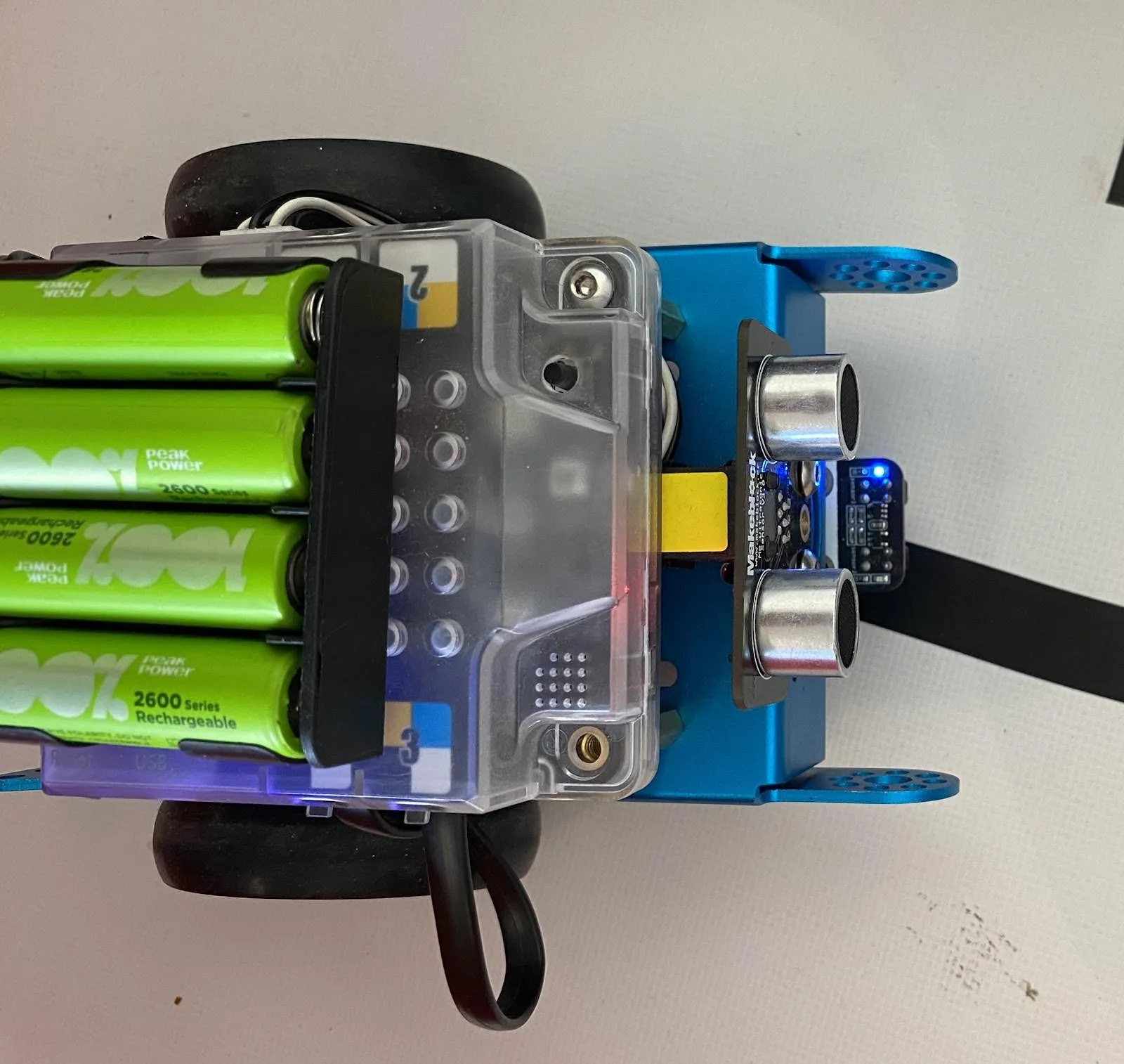
Sprzęt
Do wykonania tego zadania potrzebna będzie czarna linia na białym tle.
Taki ślad można wydrukować na papierze (zalecany minimalny format to A2, czyli 2 strony A3 lub 4 strony A4).
Taką ścieżkę można również wykonać za pomocą czarnej taśmy klejącej na wielu różnych powierzchniach. Należy jedynie upewnić się, że robot prawidłowo rozpoznaje powierzchnię jako białą oraz że taśma daje się usunąć bez pozostawiania śladów.
Aby tworzyć własne trasy, pamiętaj o kilku zasadach:
- Im bardziej zakręty są ciasne, tym większe ryzyko, że robot zjedzie z toru.
- Aby nieco utrudnić sprawę, należy upewnić się, że trasa zawiera zakręty zarówno w prawo, jak i w lewo.
- Skrzyżowania to miejsca, w których robot nie zawsze podejmuje pożądaną decyzję! Stanowią one dodatkowe utrudnienie.
Konfiguracja
Konfigurację oprogramowania można przeprowadzić ręcznie lub automatycznie.
Aby skonfigurować to automatycznie:
Ustawienia > Załaduj przykładowe ustawienia > Uczenie nadzorowane – Omijanie przeszkód (proste)
Konfigurację można również przeprowadzić ręcznie, postępując zgodnie z poniższymi wskazówkami.
- Czujniki > Podczerwone
- Czynności > Do przodu, W prawo, Do tyłu

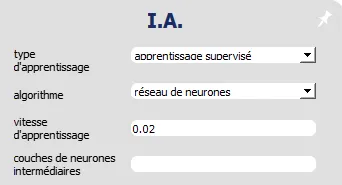
- AI > Rodzaj uczenia się: „Uczenie nadzorowane”, Algorytm: „sieć neuronowa”, Szybkość uczenia się: „0,02”, Warstwy neuronów pośrednich: puste.
- Wizualizacja > Wybierz: „animacja”, „połączenia”, „aktywność synaptyczna”, „wartości wejściowe/wyjściowe”

Trening
Nauka obsługi robota mBot wymaga zaledwie 4 czynności:
Nauczyć go chodzić:
Umieść oba czujniki podczerwieni nad czarną linią, a następnie naciśnij klawisz strzałki „⇧” na klawiaturze lub kliknij przycisk „Dalej” po prawej stronie ekranu.
Nauczyć go skręcać w prawo:
Umieść prawy czujnik nad czarną linią, a lewy czujnik na białym tle, a następnie naciśnij klawisz strzałki „⇨” na klawiaturze lub kliknij opcję „Obróć w prawo” po prawej stronie ekranu.
Nauczyć go skręcać w lewo:
Umieść lewy czujnik nad czarną linią, a prawy czujnik na białym tle, a następnie naciśnij klawisz strzałki ⇦ na klawiaturze lub kliknij opcję „Obróć w lewo” po prawej stronie ekranu.
Nauczyć go cofania:
Umieść oba czujniki podczerwieni nad białą kropką, a następnie naciśnij klawisz strzałki w dół ⇩ na klawiaturze lub kliknij przycisk „Dalej” po prawej stronie ekranu.
Twój robot jest już gotowy!
Umieść go nad czarną linią i naciśnij spację lub kliknij przycisk „Autonomiczny” w lewym dolnym rogu ekranu, a następnie pozwól robotowi poruszać się swobodnie.

Zrozumienie
Część 1
W jaki sposób robot decyduje, czy ma jechać do przodu, czy do tyłu?
Wyłącz tryby autonomiczny i uczenia się, klikając odpowiednie przyciski.
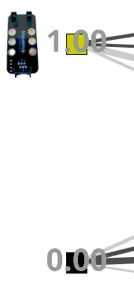
W tym ćwiczeniu występują dwa neurony wejściowe (dwa kwadraty po lewej stronie), z których każdy odpowiada czujnikowi podczerwieni umieszczonemu pod robotem.


Gdy czujniki wykrywają czerń, wartość ich neuronów wynosi 0,00.


Robot zdecyduje się wtedy jechać prosto, aby podążać za linią.
Gdy czujniki wykryją kolor biały, wartość odpowiadającego im neuronu wynosi 1,00.


Robot zdecyduje się wtedy cofnąć, aby ponownie znaleźć linię.
💡Diody nad czujnikami zapalają się, gdy czujnik wykryje kolor biały. Gasną, gdy wykryty zostanie kolor czarny.
Część 2
Skąd robot wie, kiedy i w którą stronę ma skręcić?
Neuron wejściowy może odbierać inne informacje niż pozostałe.
Jeden z dwóch czujników podczerwieni wykrywa kolor biały, podczas gdy drugi wykrywa kolor czarny.
Dzięki temu robot wie, czy linia znajduje się po jego prawej, czy po lewej stronie.
Gdy lewy czujnik wykrywa kolor biały, a prawy czujnik wykrywa kolor czarny.
Jak myślisz, w którą stronę obróci się robot?
Gdy czujnik po prawej stronie wykrywa kolor biały, a czujnik po lewej stronie wykrywa kolor czarny.


Jak myślisz, w którą stronę obróci się robot?
Bonus
Dostosuj prędkość robota do toru.
Możesz dostosować prędkość robota do toru. W tym celu przejdź do zakładki „Akcje” i przesuń suwak prędkości.

Uwaga: gdy prędkość jest zbyt mała, robot w ogóle nie jest w stanie się poruszać!
Co się dzieje, gdy prędkość jest zbyt duża?
Znajdź optymalną prędkość na swoim torze! (Zależy to od maksymalnego promienia zakrętów i szerokości linii jazdy.)
Można również zacząć od zera, aby stworzyć nowy program dla mBota. W tym celu należy włączyć tryb uczenia się, a następnie kliknąć przycisk „Zresetuj sztuczną inteligencję”. Pamięć robota zostanie wtedy wyczyszczona i będzie można zacząć od nowa.
Podczas treningu obserwuj zmiany obciążenia na łącznikach!





Warto zapamiętać:
W przeciwieństwie do czujników ultradźwiękowych czujniki podczerwieni działają w trybie binarnym: rozróżniają jedynie kolor biały lub czarny. Liczba możliwych wartości wejściowych jest zatem bardzo ograniczona, a potencjał sztucznej inteligencji w zakresie uogólniania na nowe wartości wejściowe nie jest w tym ćwiczeniu wykorzystywany.