Découvrez nos
ressources



Matériel :
- 1 robot minimum
- 1 ordinateur/robot
- Environnement plat
Paramétrage :
- Apprentissage supervisé - Suivi de ligne
Durée :
1h30 (2*45min)
Age :
8 ans et +
Recommandé pour découvrir en manipulant
Apprenez à votre robot à réagir en fonction de situations précises !
Cette activité vous permettra d’apprendre comment paramétrer le logiciel AlphAI et son réseau de neurones pour faire fonctionner mBot dans un environnement simple.
Matériel
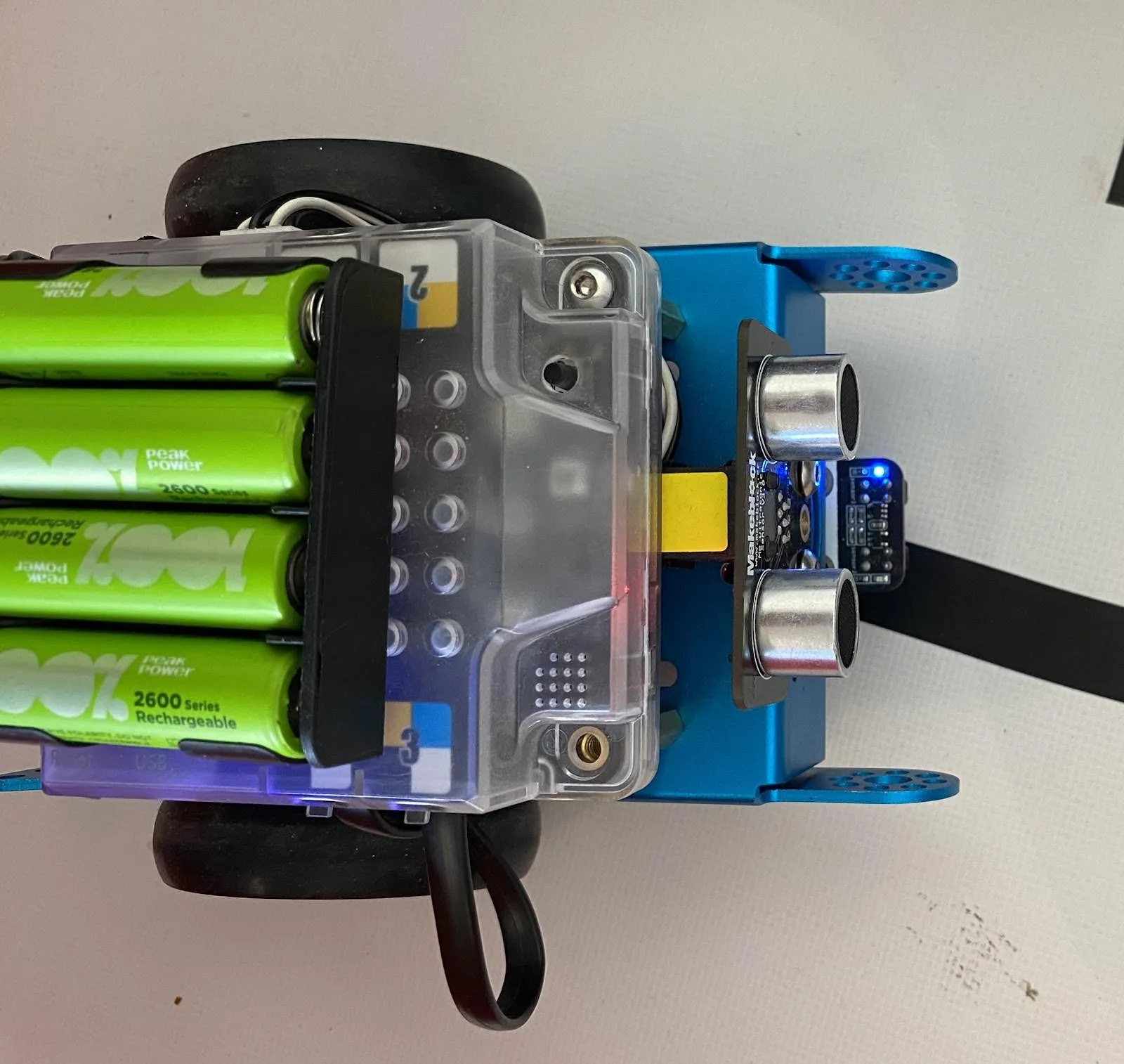
Pour la réalisation de cette activité, vous aurez besoin d’une piste de suivi de ligne noire sur fond blanc.
Vous pouvez imprimer une telle piste sur papier (le format minimal recommandé est A2, c’est-à-dire 2 pages A3 ou 4 pages A4).
Vous pouvez aussi réaliser une telle piste à l’aide de scotch noir sur une plus grande variété de surfaces. Il faut simplement s’assurer que la surface est bien détectée comme du blanc par le robot et que le scotch s’enlève sans laisser de trace.
Pour créer vos propres circuits, gardez ces quelques règles en tête :
- Plus les courbes sont serrées, et plus le robot risque de sortir de la piste.
- Pour ajouter un peu de difficulté, il faut s’assurer que la piste comporte des virages à droite et à gauche.
- Les intersections sont des points où le robot risque de ne pas toujours prendre la décision souhaitée ! Elles ajoutent de la difficulté.
Configuration
La configuration du logiciel peut se faire manuellement ou automatiquement.
Pour le configurer automatiquement :
Paramètres > Charger les paramètres d’exemple > Apprentissage supervisé – Évitement d’obstacles (simple)
La configuration peut également se faire manuellement en suivant les indications ci-contre.
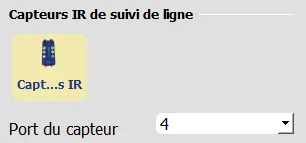
- Capteurs > Infrarouges
- Actions > Avancer , Tourner , Reculer

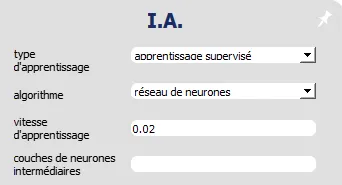
- IA > Type d’apprentissage”Apprentissage supervisé”, Algorithme« réseau de neurone », Vitesse d’apprentissage« 0.02 »,Couches de neurones intermédiaires : vide.
- Visualisation > Sélectionnez : « animation », « connexions », « activité synaptique », « valeurs entrée/sortie »

Entrainement
L’apprentissage du robot mBot peut se réaliser avec seulement 4 actions :
Lui apprendre à avancer:
Placez les deux capteurs infra-rouges au-dessus de la ligne noire et appuyez sur la flèche “⇧” de votre clavier ou cliquez sur l’action « Avancer » à droite de l’écran.
Lui apprendre à tourner à droite:
Placez le capteur de droite au-dessus de la ligne noire et le capteur de gauche sur du blanc et appuyez sur la flèche “⇨” de votre clavier ou cliquez sur l’action « Tourner à droite » à droite de l’écran.
Lui apprendre à tourner à gauche:
Placez le capteur de gauche au-dessus de la ligne noire et le capteur de droite sur du blanc et appuyez sur la flèche ⇦ de votre clavier ou cliquez sur l’action « Tourner à gauche » à droite de l’écran.
Lui apprendre à reculer:
Placez les deux capteurs infra-rouges au-dessus du blanc et appuyez sur la flèche ⇩ de votre clavier ou cliquez sur l’action « Avancer » à droite de l’écran.
Votre robot est entraîné !
Placez-le au-dessus de la ligne noire et appuyez sur la barre espace ou cliquez sur autonome en bas à gauche de l’écran et laissez le robot se mouvoir librement.

Compréhension
Partie 1
Comment le robot choisit-il entre avancer et reculer ?
Désactivez les modes autonome et apprentissage en cliquant sur les boutons correspondants.
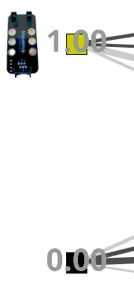
Dans cette activité, il y a deux neurones d’entrées (deux carrés à gauche) qui correspondent chacun à un capteur infra-rouge sous le robot.


Lorsque les capteurs détectent du noir, leurs neurones ont une valeur de 0.00.


Le robot va alors décider d’aller tout droit pour suivre la ligne.
Lorsque les capteurs détectent du blanc, leur neurone correspondant est égal à 1.00.


Le robot va alors décider de reculer pour retrouver la ligne.
💡Les diodes au dessus des capteurs s’allument lorsque le capteur détecte du blanc. Elles sont éteintes lorsque du noir est détecté.
Partie 2
Comment le robot sait-il quand et dans quelle direction tourner ?
Un neurone d’entrée peut recevoir une information différente de l’autre.
Un des deux capteurs infra-rouge peut détecter du blanc, alors que l’autre détecte du noir.
Cela permet au robot de savoir si la ligne se trouve sur sa droite ou sur sa gauche.
Lorsque le capteur de gauche détecte du blanc et le capteur de droite détecte du noir.
À votre avis, dans quelle direction le robot va-t-il tourner ?
Lorsque le capteur de droite détecte du blanc et le capteur de gauche détecte du noir.


À votre avis, dans quelle direction le robot va-t-il tourner ?
Bonus
Ajuster la vitesse du robot à la piste.
Vous pouvez ajuster la vitesse du robot à la piste. Pour cela, rendez-vous dans l’onglet “Actions” et déplacez le curseur vitesse.

Attention, lorsque la vitesse est trop faible, le robot ne parvient plus du tout à bouger !
Que se passe-t-il lorsque la vitesse est trop élevée ?
Trouvez la vitesse optimale pour votre circuit ! (Cela dépend de la courbure maximale des virages et de la largeur de la ligne.)
Il est aussi possible de repartir de 0 pour réaliser un nouvel entrainement de mBot. Pour cela il vous faudra activer le mode apprentissage puis cliquer sur le bouton réinitialiser l’IA. La mémoire du robot est alors effacée et il est possible de recommencer.
Lors de l’entraînement, observez l’évolution des poids des connexions !





A retenir :
Contrairement au capteur à ultra-son, les capteurs à infrarouges sont binaires : ils ne peuvent détecter que du blanc ou du noir. Le nombre d'entrées possibles est donc très limité, et le potentiel de généralisation de l'IA à de nouvelles valeurs d'entrée n'est pas exploité dans cette activité.