Découvrez nos
ressources



Le Robot
Thymio est un robot éducatif conçu par des chercheurs de l’EPFL, en collaboration avec l’ECAL, et est très populaire dans les collèges pour enseigner la programmation avec Scratch.

Grâce à notre logiciel AlphAI, les enseignants peuvent maintenant faire découvrir et comprendre l’IA à leurs élèves.
Dans nos activités, vous aurez l’occasion d’entraîner des modèles d’IA en apprentissage supervisé ou par renforcement, afin de réaliser des tâches plus complexes avec le robot Thymio.
Composition
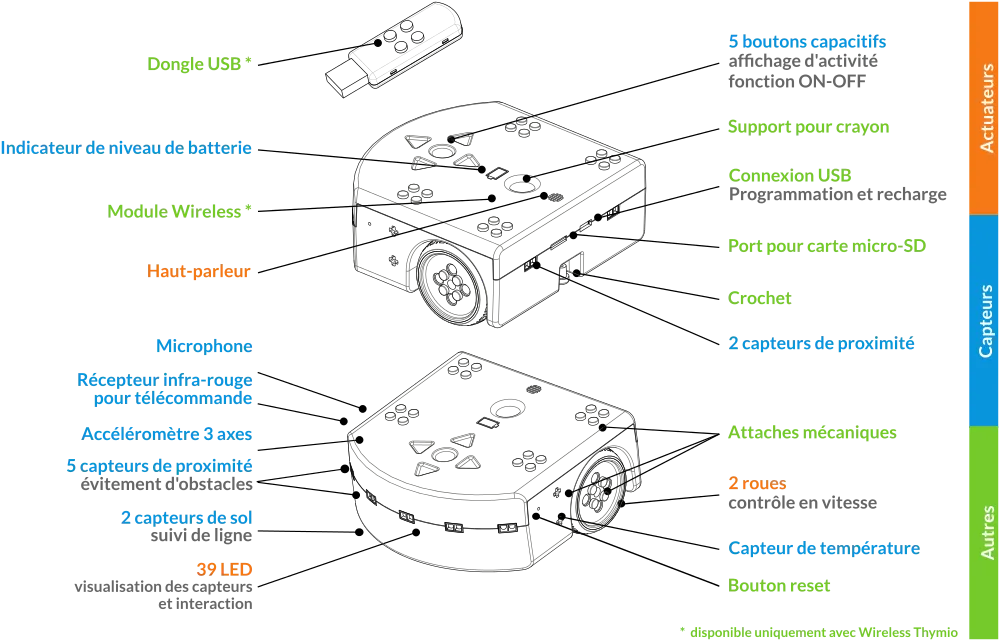
Les capteurs
Les capteurs que vous pouvez utiliser sur le logiciel sont :
IR de proximité
Permet d’utiliser les 5 capteurs infrarouges à l’avant et les 2 capteurs infrarouges à l’arrière du robot.some text
- Un premier bouton vous permet de sélectionner quels capteurs vous souhaitez activer : tous, aucun, capteurs avants, capteurs arrière, capteur central, capteurs latéraux.
- L'option mode binaire permet d'obtenir des valeurs entières 0 ou 1 au lieu de valeurs décimales entre 0 et 1.
- Lorsque le mode binaire est actif, le paramètre seuil IR permet de fixer le seuil de bascule entre les valeurs binaires 0 et 1. Par exemple, lorsque le seuil vaut 0.5 (valeur par défaut), toutes les valeurs entre 0.5 et 1 sont arrondies à 1, et toutes les valeurs entre 0 et 0.5 sont arrondies à 0.
.webp)
Suivi de ligne IR
- permet d’utiliser les 2 capteurs infrarouges de suivi de ligne, situés sous le robot. Ils communiquent une valeur entre 0 et 1 en fonction de la luminosité de la surface. Il y a deux modes principaux :some text
- Détection du noir : la valeur 0 correspond au blanc et la valeur 1 correspond au noir. Recommandé pour suivre une ligne noire sur fond blanc.
- Détection de la réflexion : la valeur 0 correspond au noir et la valeur 1 correspond au blanc
L'option mode binaire permet d'obtenir uniquement des valeurs entières 0 et 1 au lieu de valeurs décimales entre 0 et 1.
- Lorsque le mode binaire est actif, le paramètre seuil IR permet de fixer le seuil de bascule entre les valeurs binaires 0 et 1. Par exemple, lorsque le seuil vaut 0.5 (valeur par défaut), toutes les valeurs entre 0.5 et 1 sont arrondies à 1, et toutes les valeurs entre 0 et 0.5 sont arrondies à 0.
.webp)
L'accéléromètre
- Permet d’utiliser le gyroscope du robot. Il communique une valeur pour chaque axe x (derrière - devant), y (gauche - droite) et z (en bas - en haut). Vous pouvez choisir un seul des axes, ou une combinaison.
.webp)
la caméra de l’ordinateur
- permet d’utiliser la webcam de l’ordinateur en tant que capteur. Plusieurs options sont proposées, qui déterminent la résolution de la caméra et l'utilisation ou non du zoom.
Le bouton pré-calcul image caméra permet de modifier les valeurs traitées :
- lorsque le pré-calcul est désactivé, l'image est par défaut en couleurs (système RGB).
- le mode niveaux de gris capture la luminosité de chaque pixel.
- le mode couleur dans l'image détecte les couleurs. Tous les pixels blanc/gris/noirs vont obtenir la valeur 0 et les pixels de couleur la valeur 1.
- le mode canal vert détecte uniquement la présence de vert (valeurs proches de 1) ou son absence (valeurs proches de 0).
- le mode rouge vs vert renvoie pour chaque pixel une valeur entre -1 et 1 qui correspond à la quantité de rouge moins la quantité de vert.
- Le bouton prendre une photo permet de prendre une photo avec la webcam et de l'enregistrer sur votre ordinateur.
- L'option effet miroir effectue ou non un retournement de l'image (symétrie axiale gauche-droite).
- L'option indice de la caméra permet de sélectionner quelle webcam utiliser lorsque votre appareil en possède plusieurs.
.webp)
.webp)
Les actions
Les actions que vous pouvez utiliser sur le logiciel sont :
- Mouvement :

- Pivotement :

- Lumières :
Vous pouvez également créer une action personnalisée en cliquant sur le bouton :

La fenêtre suivante va alors apparaître :

Nommez votre action et cochez “action du robot” pour modifier les paramètres : la nouvelle action est désormais disponible.
Pour l'enregistrer et pouvoir la réutiliser dans le futur, cliquez sur Fichier > Sauvegarder > Enregistrer la configuration.
Environnement d’utilisation
Nous vous recommandons d’utiliser Thymio dans une arène AlphAI.
MOBSYA propose également des pistes robotiques dans lesquelles faire évoluer Thymio. Cependant, l’absence de murs limite les activités que vous pourrez réaliser.
Vous pouvez également faire simplement évoluer Thymio sur une surface plane.
Pour réaliser l’intégralité des activités sur le logiciel, Thymio aura besoin de :
- Une surface très plane, idéalement bâchée
- Des murs d’une hauteur supérieure au robot
- D’une ou plusieurs lignes au sol d’une couleur très contrastée avec la bâche (on peut utiliser du scotch noir)
Sachez également que toutes les activités sont réalisables avec le robot simulé de Thymio Suite.