Entdecken Sie unsere Lehrmaterialien



Material :
- mindestens 1 Roboter
- 1 Computer/Roboter
- Grundlegende Arena
Einstellungen :
- Überwachtes Lernen - Vermeidung von Hindernissen (einfach)
Dauer :
30 Minuten
Alter :
8 Jahre und älter
Die + dieser Aktivität :
- Quantität der Datenpunkte sehr gering.
- Leicht verständlich für jüngere Kinder.
- Führt komplexe Begriffe ein, um das Verständnis zu vertiefen.
Empfohlen zum Entdecken durch Manipulation
Diese Aktivität führt perfekt in die KI ein, indem sie den Ultraschallsensor verwendet und detailliert erklärt, wie der Roboter eine Entscheidung trifft. Der Roboter wird zunächst vom Schüler mit einer sehr begrenzten Anzahl von Datenpunkten trainiert, funktioniert dann aber einwandfrei und ermöglicht uns ein besseres Verständnis der Entscheidungsfindung des Roboters.
Videopräsentation
Einführung
Bauen Sie Ihre Arena so auf, dass sie ein Quadrat bildet. Wir empfehlen Ihnen, eine von Learning Robots entworfene Arena zu verwenden, aber Sie können auch Ihre eigene Arena bauen.
Konfiguration
Die Konfiguration der Software kann manuell oder automatisch erfolgen.
Um es automatisch einzurichten :
Einstellungen > Beispielparameter laden > Überwachtes Lernen - Hindernisvermeidung (einfach)
Die Einrichtung kann auch manuell vorgenommen werden, indem Sie den nebenstehenden Anweisungen folgen.
- Sensoren > Ultraschall

- Aktionen > Weitergehen , Drehen

- IA > Lernart "Überwachtes Lernen", Algorithmus" Neuronales Netz ", Lerngeschwindigkeit" 0.02 ",Neuronale Zwischenschichten: leer.
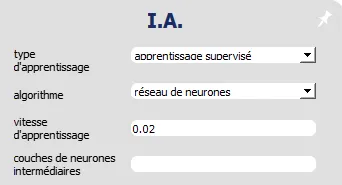
- Visualisierung > Wählen Sie: "Animation", "Verbindungen", "Synapsenaktivität", "Eingabe-/Ausgabewerte".

Training
Das Lernen des mBot-Roboters kann in nur zwei Aktionen erfolgen:
Ihm beibringen, geradeaus zu gehen, wenn es kein Hindernis gibt.
Ihm beibringen, abzubiegen (nach rechts oder links), wenn es ein Hindernis gibt.
Weitergehen:
Räumen Sie alle Gegenstände vor dem Roboter beiseite und drücken Sie den Pfeil "⇧" auf Ihrer Tastatur oder klicken Sie auf die Aktion "Vorwärts" auf der rechten Seite des Bildschirms.

Drehen :
Platziere ein Objekt vor dem Roboter und drücke den Pfeil "⇦ oder ⇨" auf deiner Tastatur oder klicke auf die Aktion "Nach rechts abbiegen" auf der rechten Seite des Bildschirms.

OK!
Ihr Roboter ist trainiert! Drücken Sie nun die Leertaste oder klicken Sie unten links auf dem Bildschirm auf "autonom" und lassen Sie den Roboter sich frei bewegen und auf Hindernisse in seinem Weg reagieren.

Zu beachten:
Beim überwachten Lernen wird die KI anhand von Beispielen trainiert. Die KI passt ihr Verhalten so an, dass sie diese Beispiele nachbildet.
Verständnis
Teil 1
Wie trifft der Roboter seine Entscheidungen?
Deaktivieren Sie den Modus "Selbstständig" und "Lernen", indem Sie die entsprechenden Schaltflächen erneut anklicken :


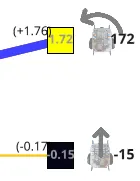
Jedes der kleinen Quadrate stellt ein Neuron dar. Man erkennt, dass beim Eingangsneuron (links) der Wert steigt, wenn die Entfernung zunimmt. (Der Wert ist gleich der Entfernung in Metern). Der Wert eines Neurons wird als Aktivierungsniveau bezeichnet.

Was die drei Ausgangsneuronen (rechts) betrifft, so erhält jedes einen berechneten Wert. Die Aktion, die dem höchsten Wert entspricht, ist diejenige, die ausgewählt wird. Wenn es kein Hindernis gibt, erhält die Aktion, die man dem Roboter als Beispiel gibt, wenn es kein Hindernis gibt, den höchsten Wert. In unserem Fall ist dies die Aktion "Vorwärtsgehen".

Ohne Hindernis "Vorwärts" = 6.39 "Drehen" = -6.23:

Mit Hindernis "Vorwärts" = -0.24 "Drehen" = 3.28:
Teil 2
Wie werden die Aktivierungsniveaus der Neuronen berechnet?
Versetzen Sie die Software in den erweiterten Modus: Einstellungen > Anzeige der Einstellungen > Erweitert.
Zeigen Sie dann die Werte an, die uns interessieren: Visualisierung > Wert der Verbindungen.

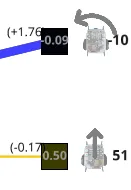
Es erscheinen sechs neue Werte:
Die drei "Gewichte" der Verbindungen zwischen den Neuronen. (in Schwarz, neben dem Symbol *)

Die 3 "neuronalen Bias" oder "Ruhewerte": auf den Verbindungen neben jedem Ausgangsneuron platziert. (In Klammern)
Der höchste Ausgabewert wird vom Roboter als Aktion ausgewählt. Diese Werte werden mit der folgenden Formel berechnet:
Ausgabe = Eingabe * Verbindung + Schrägstrich

4.00*2.50+(-0.79)=9.20
Teil 3
Wir stellen fest, dass die vorherige Gleichung die gleiche Form wie die Gleichung einer Geraden hat:
y= a x + b.
y = Ausgabe, a = Gewicht der Verbindung, x = Eingabe, b = Schräglage
Wenn man die Formel in diese Form bringt, versteht man, dass eine Änderung von a, x oder b das Ergebnis y ändert .
Wir können die Formel also überprüfen, indem wir einen dieser Werte ändern. Unter diesen Werten gibt es nur einen Wert, den wir ändern können.
Hierbei handelt es sich um die Eingabe(x). Tatsächlich stellt x das Eingangsneuron dar . In unserem Fall ist das Eingangsneuron der Ultraschallsensor des Roboters. Um den Wert von x zu ändern, müssen Sie nur Ihre Hand oder ein Objekt zum Ultraschallsensor des Roboters hin oder von ihm weg bewegen.
Hindernis sehr nah
Indem man seine Hand sehr nah an den Ultraschallsensor hält, senkt man den Wert des Eingangs x, da dieser gleich der vom Sensor gemessenen Entfernung ist.
Wenn der Eingabewert x klein ist , nähern sich die Aktivierungsniveaus y der Ausgabeneuronen den Bias-Werten b an.
In diesem Fall gewinnt die Aktion Drehen, da sie den höchsten Bias-Wert hat.

Das Hindernis beiseite räumen
Indem man seine Hand vom Sensor wegbewegt, erhöht man allmählich den Wert der Eingabe x.
Wenn der Wert der Eingabe x steigt , entfernen sich die Aktivierungsniveaus y der Ausgabeneuronen von den neuronalen Biases b. Der Wert der Aktion Drehen sinkt, weil das Gewicht seiner Verbindung negativ ist, während der Wert der Aktion Vorwärts steigt, weil seine Verbindung positiv ist.
Ab einem bestimmten Wert von x gewinnt die Aktion Vorwärts, da ihr Wert die anderen übertrifft.
Teil 4
KI zurücksetzen

Wenn Sie die KI zurücksetzen, werden die Werte für Verbindungen(a) und Bias(b) durch Zufallswerte ersetzt. Überprüfen Sie es selbst!
Wenn das Lernen läuft (Schaltfläche "Lernen" aktiv und "Erfahrungsspeicher" nicht leer), verändern sich die Gewichte von Verbindungen und Biases: das ist maschinelles Lernen.

+ Erfahrungsspeicher: 36 = Veränderung von (+3.78)
Wenn das Lernen hingegen gestoppt wird (weiße Schaltfläche "Lernen" oder leerer "Erfahrungsspeicher"), frieren die Werte für Verbindungen und Bias ein.
OUErfahrungsspeicher: leer = Fixierung von (+3.78)
Zum Vormerken:
Überwachtes Lernen ist eine Methode des maschinellen Lernens, bei der ein neuronales Netz ein Verhalten anhand von Beispielen erlernt, die von Menschen vorgegeben werden.
Wenn ein neuronales Netz lernt, verändern sich seine internen Parameter (Verbindungsgewichte und Bias-Werte). Sie frieren ein, wenn der Lernvorgang abgeschlossen ist.
Bonus
Wenn Sie möchten, können Sie dem Roboter Aktionen hinzufügen und sein Training verbessern, damit seine Bewegungen komplexer und natürlicher werden und er leichter aus Sackgassen herauskommt.
Fügen Sie im Bereich "Aktionen" z. B. "Zurücksetzen" hinzu und bringen Sie dem Roboter auch das Zurücksetzen bei, wenn er zu nahe an einem Hindernis steht.

Sie können auch den Grad der Drehung einstellen. Aktivieren Sie im Bereich "Aktionen" die Aktion "Leichtes Drehen". Sie können den Roboter so trainieren, dass er je nach Abstand zum Hindernis eine stärkere oder schwächere Kurve macht.
Hinweis: Wenn der Roboter diagonal auf ein Hindernis zufährt, erkennt der Ultraschallsensor dieses Hindernis nicht gut. Wissen Sie, warum das so ist?
Um diese Aufgabe zu lösen, gehen Sie zu Aktivität 4 : Ausweichen eines komplexen Hindernisses