Entdecken Sie unsere Lehrmaterialien



Material :
- mindestens 1 Roboter
- 1 Computer/Roboter
- Flache Umgebung
Einstellungen :
- Beaufsichtigtes Lernen - Linienverfolgung
Dauer :
1.30 Uhr (2*45min)
Alter :
8 Jahre und älter
Empfohlen zum Entdecken durch Manipulation
Bringen Sie Ihrem Roboter bei, auf bestimmte Situationen zu reagieren!
In dieser Aktivität lernen Sie, wie Sie die AlphAI-Software und das neuronale Netz einrichten, um mBot in einer einfachen Umgebung zu betreiben.
Material
Für die Durchführung dieser Aktivität benötigen Sie eine schwarze Linienverfolgungsspur auf weißem Hintergrund.
Sie können einen solchen Track auf Papier ausdrucken (das empfohlene Mindestformat ist A2, d. h. 2 Seiten A3 oder 4 Seiten A4).
Sie können eine solche Spur auch mit schwarzem Klebeband auf einer größeren Vielfalt von Oberflächen herstellen. Sie müssen nur sicherstellen, dass die Oberfläche vom Roboter als weiß erkannt wird und dass sich das Klebeband rückstandsfrei entfernen lässt.
Wenn Sie Ihre eigenen Touren erstellen wollen, sollten Sie diese Regeln im Hinterkopf behalten:
- Je enger die Kurven sind, desto größer ist die Wahrscheinlichkeit, dass der Roboter von der Strecke abkommt.
- Um die Sache noch etwas schwieriger zu machen, solltest du darauf achten, dass die Strecke Rechts- und Linkskurven hat.
- Kreuzungen sind Punkte, an denen der Roboter möglicherweise nicht immer die gewünschte Entscheidung trifft! Sie erhöhen die Schwierigkeit.
Konfiguration
Die Konfiguration der Software kann manuell oder automatisch erfolgen.
Um es automatisch einzurichten :
Einstellungen > Beispielparameter laden > Überwachtes Lernen - Hindernisvermeidung (einfach)
Die Einrichtung kann auch manuell vorgenommen werden, indem Sie den nebenstehenden Anweisungen folgen.
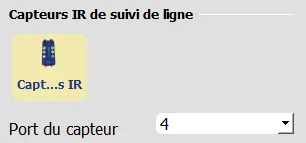
- Sensoren > Infrarot
- Aktionen > Vorwärts , Drehen , Rückwärts

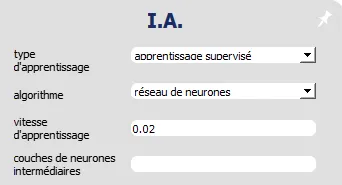
- IA > Lernart "Überwachtes Lernen", Algorithmus" Neuronales Netz ", Lerngeschwindigkeit" 0.02 ",Neuronale Zwischenschichten: leer.
- Visualisierung > Wählen Sie: "Animation", "Verbindungen", "Synapsenaktivität", "Eingabe-/Ausgabewerte".

Training
Das Lernen des mBot-Roboters kann mit nur vier Aktionen erfolgen:
Ihm beibringen, wie man weiterkommt:
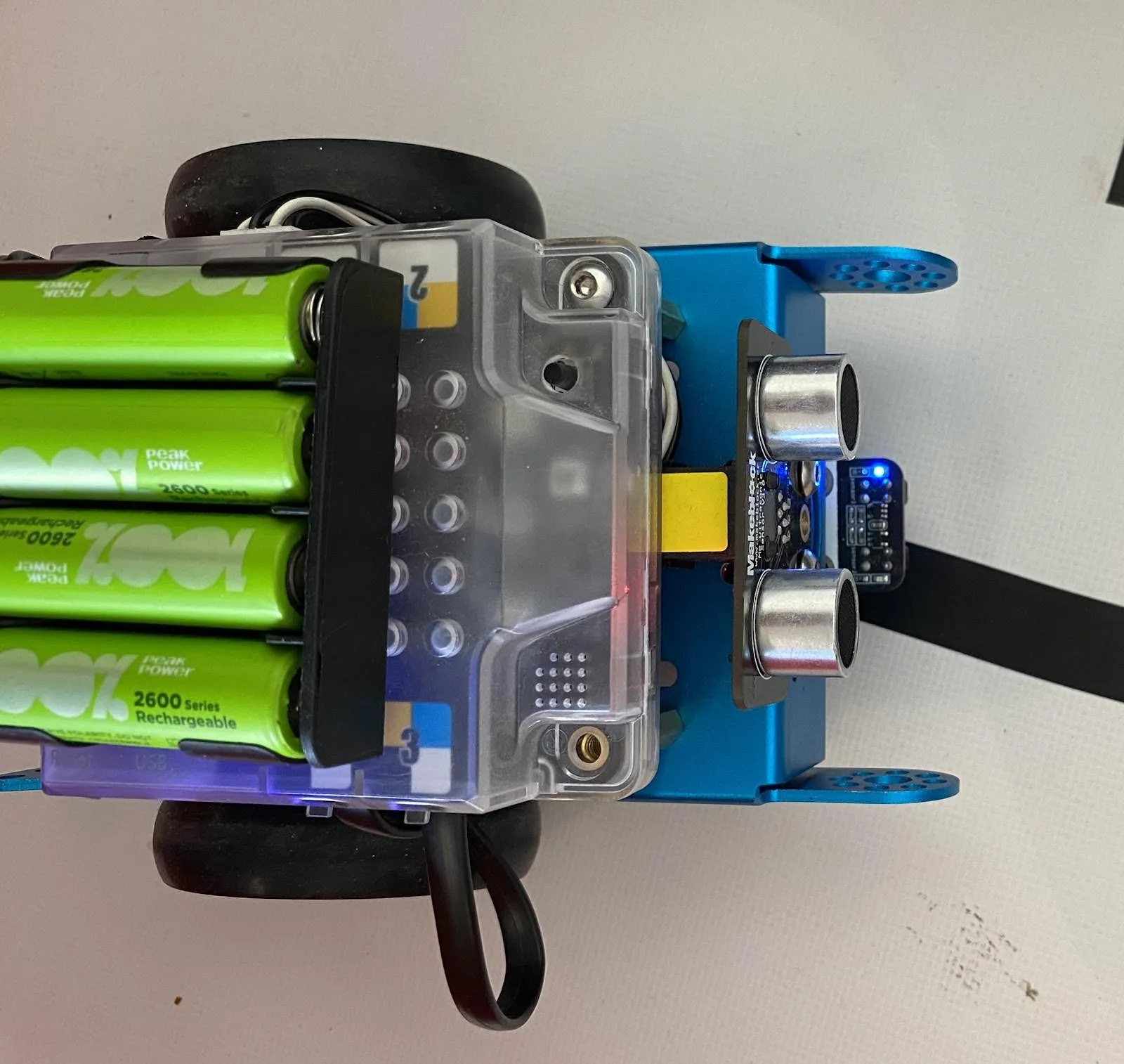
Platziere die beiden Infrarotsensoren über der schwarzen Linie und drücke den Pfeil "⇧" auf deiner Tastatur oder klicke auf die Aktion "Vorwärts" auf der rechten Seite des Bildschirms.
Ihm beibringen, wie man rechts abbiegt:
Platzieren Sie den rechten Sensor über der schwarzen Linie und den linken Sensor über Weiß und drücken Sie den Pfeil "⇨" auf Ihrer Tastatur oder klicken Sie auf die Aktion "Nach rechts drehen" auf der rechten Seite des Bildschirms.
Ihm das Linksabbiegen beibringen:
Platzieren Sie den linken Sensor über der schwarzen Linie und den rechten Sensor über Weiß und drücken Sie die Pfeiltaste ⇦ auf Ihrer Tastatur oder klicken Sie auf die Aktion "Nach links drehen" auf der rechten Seite des Bildschirms.
Ihm das Zurückweichen beibringen:
Platziere die beiden Infrarotsensoren über dem Weiß und drücke den Pfeil ⇩ auf deiner Tastatur oder klicke auf die Aktion "Vorwärts" auf der rechten Seite des Bildschirms.
Ihr Roboter wird trainiert!
Platzieren Sie ihn über der schwarzen Linie und drücken Sie die Leertaste oder klicken Sie unten links auf dem Bildschirm auf autonom und lassen Sie den Roboter sich frei bewegen.

Verständnis
Teil 1
Wie wählt der Roboter zwischen vorwärts und rückwärts?
Deaktivieren Sie den Standalone- und den Lernmodus, indem Sie auf die entsprechenden Schaltflächen klicken.
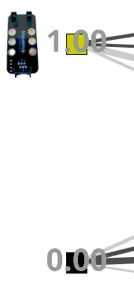
In dieser Aktivität gibt es zwei Inputneuronen (zwei Quadrate auf der linken Seite), die jeweils einem Infrarotsensor unter dem Roboter entsprechen.


Wenn die Sensoren Schwarz erkennen, haben ihre Neuronen einen Wert von 0,00.


Der Roboter wird sich dann entscheiden, geradeaus zu gehen, um der Linie zu folgen.
Wenn die Sensoren Weiß erkennen, ist ihr entsprechendes Neuron gleich 1.00.


Der Roboter wird sich dann entscheiden, rückwärts zu fahren, um die Linie wiederzufinden.
💡Die LEDs über den Sensoren leuchten auf, wenn der Sensor Weiß erkennt. Sie sind ausgeschaltet, wenn Schwarz erkannt wird.
Teil 2
Woher weiß der Roboter, wann und in welche Richtung er sich drehen muss?
Ein Eingangsneuron kann eine andere Information erhalten als das andere.
Einer der beiden Infrarotsensoren kann Weiß erkennen, während der andere Schwarz erkennt.
Dadurch kann der Roboter erkennen, ob sich die Linie rechts oder links von ihm befindet.
Wenn der linke Sensor Weiß erkennt und der rechte Sensor Schwarz erkennt.
In welche Richtung wird sich der Roboter Ihrer Meinung nach drehen?
Wenn der rechte Sensor Weiß erkennt und der linke Sensor Schwarz erkennt.


In welche Richtung wird sich der Roboter Ihrer Meinung nach drehen?
Bonus
Passen Sie die Geschwindigkeit des Roboters an die Strecke an.
Sie können die Geschwindigkeit des Roboters an die Strecke anpassen. Gehen Sie dazu auf die Registerkarte "Aktionen" und bewegen Sie den Schieberegler "Geschwindigkeit".

Achtung: Wenn die Geschwindigkeit zu niedrig ist, kann sich der Roboter überhaupt nicht mehr bewegen!
Was passiert, wenn die Geschwindigkeit zu hoch ist?
Finde die optimale Geschwindigkeit für deine Strecke! (Dies hängt von der maximalen Kurvenkrümmung und der Breite der Strecke ab).
Es ist auch möglich, bei Null anzufangen, um ein neues mBot-Training durchzuführen. Dazu müssen Sie den Lernmodus aktivieren und dann auf die Schaltfläche KI zurücksetzen klicken. Der Speicher des Roboters wird dann gelöscht und Sie können neu beginnen.
Achte beim Training darauf, wie sich die Gewichte der Verbindungen entwickeln!





Zu beachten:
Im Gegensatz zum Ultraschallsensor sind Infrarotsensoren binär: Sie können nur weiß oder schwarz erkennen. Die Anzahl der möglichen Eingaben ist daher sehr begrenzt, und das Potenzial, die KI auf neue Eingabewerte zu verallgemeinern, wird in dieser Aktivität nicht ausgeschöpft.