Zapoznaj się z naszymimateriałami na stronie



Robot
Thymio to robot edukacyjny zaprojektowany przez naukowców z EPFL we współpracy z ECAL, który cieszy się dużą popularnością w gimnazjach jako narzędzie do nauki programowania w języku Scratch.

Dzięki naszemu oprogramowaniu AlphAI nauczyciele mogą teraz przybliżać uczniom temat sztucznej inteligencji i pomagać im w jej zrozumieniu.
W ramach naszych działań będziesz mieć okazję trenować modele sztucznej inteligencji w ramach uczenia nadzorowanego lub uczenia opartego na wzmocnieniu, aby wykonywać bardziej złożone zadania za pomocą robota Thymio.
Skład
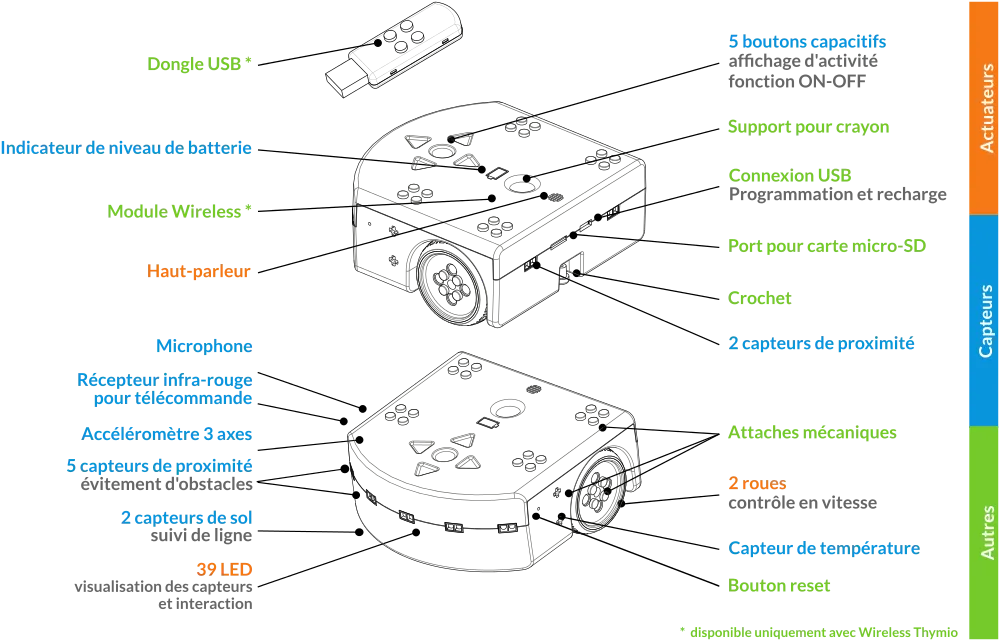
Czujniki
Czujniki, z których można korzystać w programie, to:
IR w pobliżu
Umożliwia korzystanie z 5 czujników podczerwieni z przodu i 2 czujników podczerwieni z tyłu robota.
- Pierwszy przycisk pozwala wybrać, które czujniki chcesz włączyć: wszystkie, żadne, czujniki przednie, czujniki tylne, czujnik środkowy, czujniki boczne.
- Opcja trybu binarnego pozwala uzyskać wartości całkowite 0 lub 1 zamiast wartości dziesiętnych z przedziału od 0 do 1.
- Gdy tryb binarny jest aktywny, parametr progu IR pozwala ustawić próg przełączania między wartościami binarnymi 0 i 1. Na przykład, gdy próg wynosi 0,5 (wartość domyślna), wszystkie wartości z przedziału od 0,5 do 1 są zaokrąglane do 1, a wszystkie wartości z przedziału od 0 do 0,5 są zaokrąglane do 0.
.webp)
Monitorowanie linii za pomocą podczerwieni
- umożliwia korzystanie z dwóch czujników podczerwieni do śledzenia linii, umieszczonych pod robotem. Przekazują one wartość z przedziału od 0 do 1 w zależności od jasności powierzchni. Dostępne są dwa główne tryby: some text
- Wykrywanie czerni: wartość 0 odpowiada kolorowi białemu, a wartość 1 – czarnemu. Zalecane do śledzenia czarnej linii na białym tle.
- Wykrywanie odbicia: wartość 0 odpowiada kolorowi czarnemu, a wartość 1 – kolorowi białemu
Opcja trybu binarnego pozwala uzyskać wyłącznie wartości całkowite 0 i 1 zamiast wartości dziesiętnych z przedziału od 0 do 1.
- Gdy tryb binarny jest aktywny, parametr progu IR pozwala ustawić próg przełączania między wartościami binarnymi 0 i 1. Na przykład, gdy próg wynosi 0,5 (wartość domyślna), wszystkie wartości z przedziału od 0,5 do 1 są zaokrąglane do 1, a wszystkie wartości z przedziału od 0 do 0,5 są zaokrąglane do 0.
.webp)
Akcelerometr
- Umożliwia korzystanie z żyroskopu robota. Przekazuje wartość dla każdej osi: x (do tyłu – do przodu), y (w lewo – w prawo) oraz z (w dół – w górę). Można wybrać jedną oś lub kombinację osi.
.webp)
kamera w komputerze
- umożliwia wykorzystanie kamery internetowej komputera jako czujnika. Dostępnych jest kilka opcji, które określają rozdzielczość kamery oraz to, czy ma być używany zoom.
Przycisk „Wstępne obliczenia obrazu z kamery ” pozwala na zmianę przetworzonych wartości:
- gdy funkcja wstępnego obliczania jest wyłączona, obraz domyślnie wyświetlany jest w kolorach (system RGB).
- Tryb skali szarości rejestruje jasność każdego piksela.
- Tryb kolorów w obrazie rozpoznaje kolory. Wszystkie białe, szare i czarne piksele otrzymają wartość 0, a kolorowe piksele – wartość 1.
- Tryb kanału zielonego wykrywa wyłącznie obecność koloru zielonego (wartości bliskie 1) lub jego brak (wartości bliskie 0).
- Tryb czerwony-zielony zwraca dla każdego piksela wartość z przedziału od -1 do 1, która odpowiada różnicy między intensywnością koloru czerwonego a intensywnością koloru zielonego.
- Przycisk „Zrób zdjęcie” pozwala zrobić zdjęcie za pomocą kamery internetowej i zapisać je na komputerze.
- Opcja „efekt lustrzany” powoduje odwrócenie obrazu (symetria osiowa wzdłuż osi lewo-prawo) lub nie.
- Opcja „Wybór kamery” pozwala wybrać, której kamery internetowej chcesz użyć, jeśli Twoje urządzenie ma ich kilka.
.webp)
.webp)
Akcje
Funkcje dostępne w programie to:
- Ruch:

- Obrót:

- Oświetlenie:
Można również utworzyć akcję niestandardową, klikając przycisk:

Pojawi się wtedy następujące okno:

Nadaj nazwę akcji i zaznacz opcję „akcja robota”, aby zmienić ustawienia: nowa akcja jest już dostępna.
Aby zapisać tę konfigurację i móc z niej skorzystać w przyszłości, kliknij Plik > Zapisz > Zapisz konfigurację.
Warunki użytkowania
Zalecamy korzystanie z Thymio na arenie AlphAI.
Firma MOBSYA oferuje również tory dla robotów, po których można poruszać Thymio. Jednak brak ścianek ogranicza zakres możliwych działań.
Można też po prostu poruszać Thymio po płaskiej powierzchni.
Aby móc w pełni korzystać z funkcji programu, Thymio będzie potrzebował:
- Bardzo równa powierzchnia, najlepiej przykryta plandeką
- Ściany wyższe od robota
- Jedna lub kilka linii na podłożu w kolorze silnie kontrastującym z plandeką (można użyć czarnej taśmy klejącej)
Warto również pamiętać, że wszystkie te zadania można wykonać za pomocą symulowanego robota z pakietu Thymio Suite.