Zapoznaj się z naszymimateriałami na stronie


Materiały:
- Roboty Thymio
- 1 szt. / robot
- Arena(y)
Najważniejsze zalety:
- Ogólny przegląd robotyki i sztucznej inteligencji
- Wyjaśnia różne pojęcia (sztuczna inteligencja ≠ programowanie; uczenie nadzorowane ≠ uczenie się przez wzmocnienie)
Czas trwania:
3 godziny
Wiek:
Od 10 lat
Ustawienia:
Wszystkie cztery operacje wykorzystują konfiguracje już istniejące w oprogramowaniu
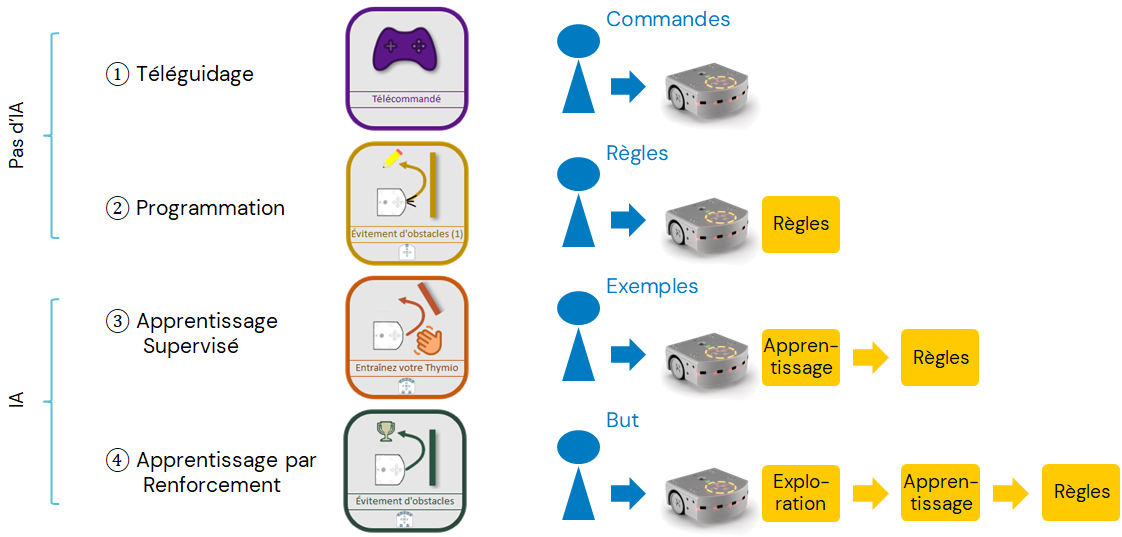
Ten zestaw czterech ćwiczeń pozwala dobrze zrozumieć różne sposoby sterowania maszyną, od zdalnego sterowania (całkowity brak autonomii maszyny) po uczenie się przez wzmocnienie (samodzielne uczenie się maszyny). Pokazujemy jednak, że niezależnie od poziomu to człowiek pozostaje panem maszyny, ponieważ tylko on może wyznaczyć jej cel.
Wyjaśnimy również jasno różnicę między tym, co dziś nazywamy „sztuczną inteligencją”, czyli systemami, w których maszyna się uczy (poziomy 3 i 4), a programowaniem deterministycznym (poziom 2).
Slajdy zawierają dodatkowe instrukcje dotyczące obsługi oraz przedstawiają cztery poziomy za pomocą schematów podsumowujących.
Te 4 czynności to:
1. Sterowanie zdalne: użytkownik wczytuje konfigurację „Sterowanie zdalne”, a następnie wybiera czynności, które ma wykonać robot. Zapoznaje się również z oprogramowaniem. Robot nie działa samodzielnie, ponieważ to człowiek w każdej chwili decyduje o jego działaniach.
2. Programowanie: użytkownik wczytuje konfigurację „Edycja ręczna – omijanie przeszkód”, a następnie musi określić reguły podejmowania decyzji przez robota w zależności od tego, czy czujniki wykryją, że jest on zablokowany, czy nie (należy wybrać połączenia, które mają zostać utworzone w ramach mini sieci sztucznych neuronów). Użytkownik ustawia program, a następnie naciska przycisk „Autonomiczny”, aby go przetestować. Wyświetlacze „Nagroda” i „Poziom” pokazują wartości tym wyższe, im dłużej robot porusza się bez blokowania: ćwiczenie to można przedstawić jako grę, w której należy zmaksymalizować poziom, jaki osiągnie robot (uwaga: „poziom” to średnia „nagród” uzyskanych w ciągu minuty; pojęcie nagrody pojawi się ponownie na poziomie 4 „uczenie się przez wzmocnienie”). Wykonując to zadanie, użytkownik„zaprogramował” swojego robota Thymio: robot może następnie działać autonomicznie, ale zawsze wykonując to, co zostało zaplanowane. Zadanie można powtórzyć z innymi konfiguracjami z kategorii „Edycja ręczna”, których poziom trudności stopniowo rośnie. Można również podkreślić, że aby robot był autonomiczny, musi być wyposażony w czujniki.
3. Uczenie nadzorowane: użytkownicy wczytują konfigurację „Wyszkol swojego Thymio” i uczą swoje roboty poruszania się po torze. Dużą różnicą w stosunku do poprzedniego poziomu „programowania” jest to, że użytkownik nie ustala już bezpośrednio reguł obliczeniowych do analizy danych z czujników; zamiast tego dostarcza po prostu przykłady, na podstawie których sztuczna inteligencja samodzielnie znajduje („uczy się”) reguły, których ma używać. Zobacz aktywność „Thymio bojaźliwy”, aby uzyskać więcej szczegółów na temat uczenia nadzorowanego.
4. Uczenie się przez wzmocnienie: użytkownicy wczytują konfigurację „Uczenie się przez wzmocnienie – omijanie przeszkód” i po prostu naciskają przycisk „Autonomiczny”. Roboty zaczynają się uczyć, nie na podstawie przykładów dostarczonych przez człowieka, ale na podstawie własnych doświadczeń, które gromadzą, prowadząc własne „eksploracje”, czyli metodą prób i błędów. Ponownie pojawia się wyświetlacz nagrody ( oraz poziom, który oblicza średnią nagrodę): to właśnie tę nagrodę sztuczna inteligencja stara się zmaksymalizować; nagroda nie jest częścią sztucznej inteligencji, jest to program pomocniczy, który analizuje ruchy i blokady robota. Człowiek nie jest więc wykluczony z pętli, ponieważ to on zdecydował o sposobie wynagradzania, aby móc wyszkolić sztuczną inteligencję do zachowania, które dla niej wybrał. Więcej szczegółów na temat tego poziomu można znaleźć również w aktywności „Arena”.