Zapoznaj się z naszymimateriałami na stronie



Potrzebne materiały:
- Co najmniej 1 robot
- 1 komputer/robot
- Płaska powierzchnia w jasnym kolorze
- Czarna taśma klejąca
Ustawienia oprogramowania:
„Śledzenie linii” w trybie ręcznym (tworzenie połączeń bezpośrednio w oprogramowaniu) lub w trybie uczenia nadzorowanego (szkolenie robota na torze)
Czas trwania:
od 30 minut do 2 godzin
Wiek:
od 10 lat
Zalety tej aktywności:
- Potrzeba niewiele sprzętu
- Bardzo proste i szybkie w wykonaniu
- Sieć neuronowa, którą bardzo łatwo zrozumieć
To ćwiczenie wykonujemy z każdym robotem osobno. Nauczymy robota, jak podążać po wytyczonej na podłodze trasie, tak aby nie zboczył z kursu!
Uczniowie dowiadują się, że powodzenie uczenia nadzorowanego zależy bardziej od jakości i kompletności danych szkoleniowych robota niż od ich ilości. Z łatwością zrozumieją zasadę działania sztucznej sieci neuronowej, ponieważ ta wykorzystana w tym ćwiczeniu jest bardzo prosta i przejrzysta (5 wejść, 5 lub 6 wyjść).
[Wkrótce dostępny materiał wideo]
Wprowadzenie
Na płaskiej powierzchni o jednolitym, jasnym kolorze wyznacz trasę za pomocą czarnej taśmy (dołączonej do zestawu).
Jeśli chcesz używać własnego sprzętu, upewnij się, że robot dobrze rozróżnia kontrast między podłogą a linią.
Klasyczny kształt to cyfra „8”, ale nie wahajcie się puścić wodze fantazji!
Pamiętajcie jednak, aby zawsze tworzyć łagodne łuki, aby nie dezorientować robota.
Ustawienia (logowanie)
Podłącz robota do komputera (patrz sekcja podłączanie robota w razie potrzeby), a następnie wybierz przykładową konfigurację „śledzenie linii” w trybie edycji ręcznej lub uczenia nadzorowanego lub utwórz własne parametry.
Proszę upewnić się, że prędkość robota wynosi maksymalnie 20, korzystając z suwaka znajdującego się na dole ekranu.
Trening
Jeśli korzystasz z edycji ręcznej:
Sprawdź, czy przyciski „tryb autonomiczny” i „uczenie się” są wyłączone, a przycisk „edycja ręczna” jest włączony.
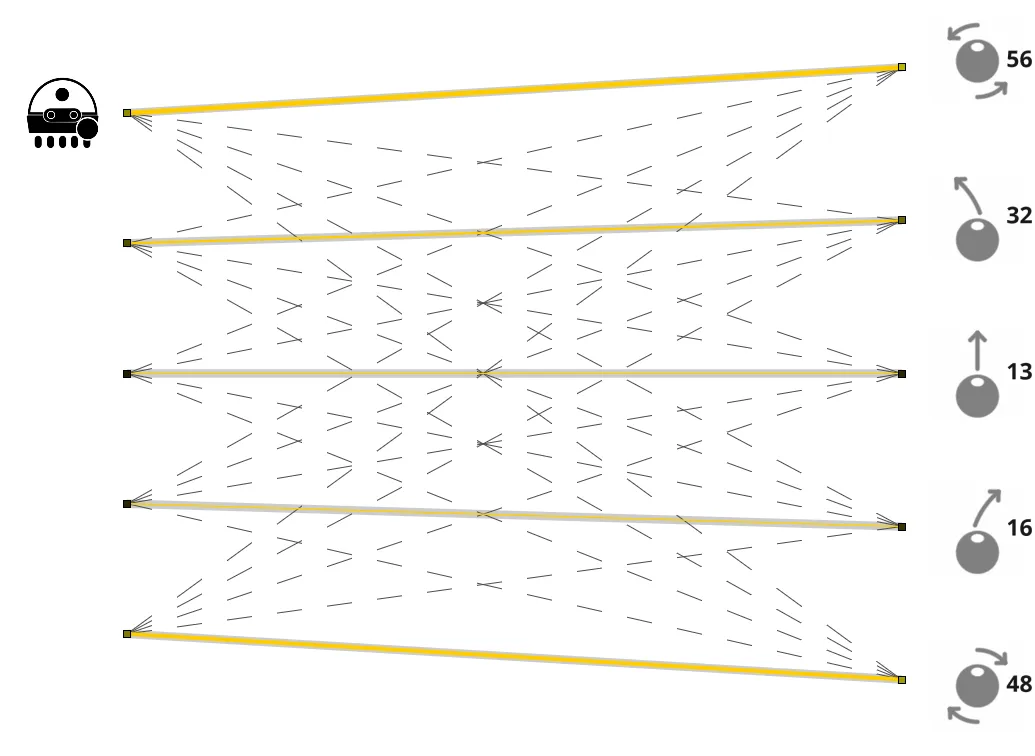
Kliknij na linki między neuronami wejściowymi (czujniki podczerwieni) a wyjściowymi (działanie robota), aby utworzyć połączenie. Zalecamy utworzenie następujących połączeń:
- Lewy czujnik podczerwieni: obrócić w lewo
- Czujnik podczerwieni pośrodku po lewej stronie: lekko obrócić w lewo
- Środkowy czujnik podczerwieni: jedź prosto
- Czujnik podczerwieni pośrodku po prawej stronie: lekko obrócić w prawo
- Czujnik podczerwieni po prawej stronie: obróć w prawo
Oto jak powinna wyglądać Twoja sieć neuronowa:
Jeśli uczysz się pod nadzorem:
Sprawdź, czy opcja „tryb autonomiczny” jest odznaczona, a opcja „uczenie się” zaznaczona.
Umieść robota na linii narysowanej na podłodze, aby aktywować czujniki. Za każdym razem, gdy jeden z czujników zostanie aktywowany, uruchom odpowiednią akcję:
- Lewy czujnik podczerwieni: obrócić w lewo
- Czujnik podczerwieni pośrodku po lewej stronie: lekko obrócić w lewo
- Środkowy czujnik podczerwieni: jedź prosto
- Czujnik podczerwieni pośrodku po prawej stronie: lekko obrócić w prawo
- Czujnik podczerwieni po prawej stronie: obróć w prawo
- Żaden czujnik nie reaguje: cofnij się
Zalecamy podanie kilku przykładów dla każdej sytuacji.
Test wiedzy
Po skonfigurowaniu sieci neuronowej sprawdźmy, czy robotowi uda się jechać wzdłuż linii!
Umieść go na początku trasy, włącz tryb autonomiczny i zobacz, jak sobie radzi.
Następnie możesz skomplikować tor, dodając do niego skrzyżowania, aby stworzyć robotom nowe wyzwania!
Podsumowanie i wnioski
Dzięki bardzo prostej sieci neuronowej i niewielkiej ilości danych szkoleniowych robotowi udało się jechać po linii.
W programie można sprawdzić, jaką wagę przypisano każdemu połączeniu, i zrozumieć, w jaki sposób robot podejmuje decyzje: w zależności od tego, który czujnik jest włączony (lub nie), algorytm przypisuje priorytety do każdej z możliwych akcji; robot wybiera akcję o najwyższym priorytecie.
Twój robot zjechał z toru lub wybrał niewłaściwą akcję? Spróbuj dowiedzieć się, dlaczego! Kilka wskazówek:
- jest tu pewna nieścisłość: popełniłeś błąd podczas programowania robota
- uruchomiło się jednocześnie kilka czujników, na przykład na skrzyżowaniu: czy robot został przeszkolony, by reagować w takiej sytuacji?
- kąt nachylenia linii na ziemi jest zbyt stromy
- prędkość robota jest zbyt duża