Découvrez nos
ressources



Matériel nécessaire :
- 1 robot minimum
- 1 ordinateur/robot
- Surface plane de couleur claire
- Ruban adhésif noir
Paramètrage logiciel :
“Suivi de ligne” en édition manuelle (créez les connexions directement sur le logiciel) ou en apprentissage supervisé (entraînez le robot sur la piste)
Durée :
30 minutes à 2 heures
Age :
10 ans et +
Les + de cette activité :
- Peu de matériel nécessaire
- Très simple et rapide à réaliser
- Réseau de neurones très facile à comprendre
Cette activité est réalisée avec chaque robot individuellement. Nous allons apprendre au robot à suivre un tracé au sol, sans qu’il ne se trompe !
Les élèves apprennent que le succès de l'apprentissage supervisé dépend plus de la qualité et de l’exhaustivité des données d’entraînement du robot que de leur quantité. Ils pourront comprendre très facilement le principe du réseau de neurones artificiels, car celui utilisé dans cette activité est très simple et lisible (5 entrées, 5 ou 6 sorties).
[Contenu vidéo à venir]
Introduction
Sur une surface plane de couleur unie et claire, tracez un parcours grâce à un scotch de couleur noire (fourni avec les arènes).
Si vous souhaitez utiliser votre propre matériel, veillez à ce que le robot perçoive bien le contraste entre le sol et la ligne.
La forme classique est un “8”, mais n’hésitez pas à faire parler votre imagination !
Veillez cependant à toujours créer des courbes douces pour ne pas perturber le robot.
Paramétrage (connexion)
Connectez le robot à un ordinateur (voir section connexion au robot si besoin), puis choisissez la configuration d'exemple “suivi de ligne” en édition manuelle ou en apprentissage supervisé, ou bien créez vos propres paramètres.
Veillez à vérifier que le robot a une vitesse inférieure ou égale à 20 à l’aide du curseur au bas de vôtre écran.
Entraînement
Si vous êtes en édition manuelle :
Vérifiez que les boutons « autonome » et “apprentissage” sont désactivés, et que le bouton “édition manuelle” est bien activé.
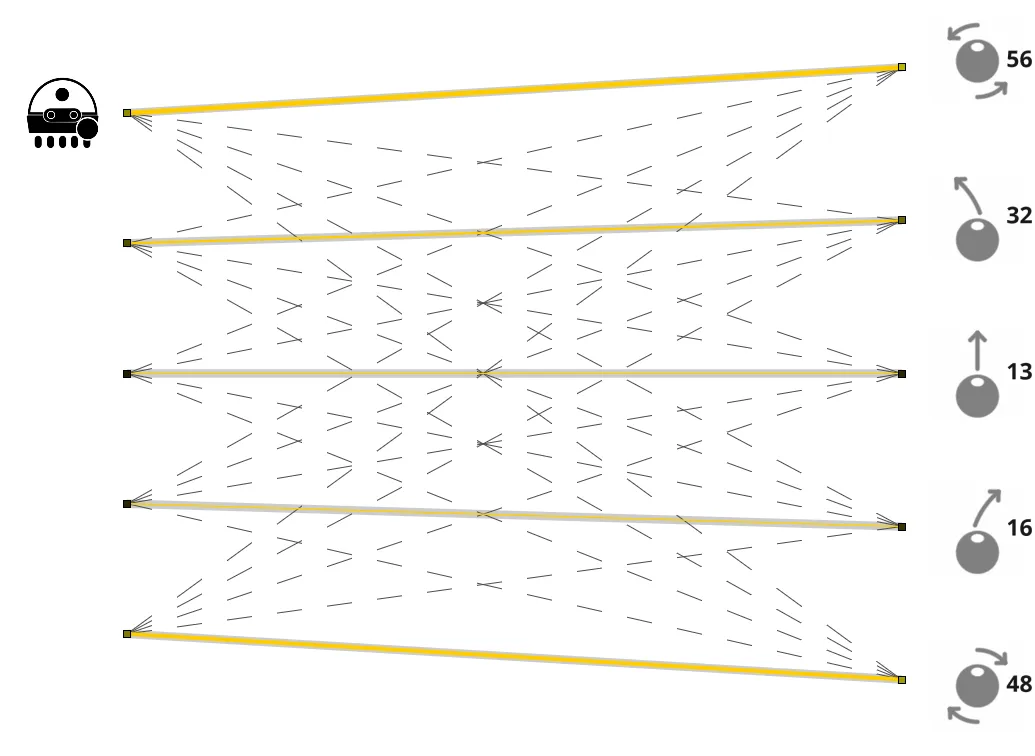
Cliquez sur les liens entre les neurones d’entrée (capteurs infrarouges) et de sortie (action du robot) pour créer une connexion. Nous vous conseillons de créer les connexions suivantes :
- Capteur IR gauche : pivoter à gauche
- Capteur IR centre gauche : tourner légèrement à gauche
- Capteur IR central : aller tout droit
- Capteur IR centre droit : tourner légèrement à droite
- Capteur IR droite : pivoter à droite
Voici alors à quoi devrait ressembler votre réseau de neurones :
Si vous êtes en apprentissage supervisé :
Vérifiez que le bouton « autonome » est bien décoché, et que le bouton “apprentissage” est bien coché.
Placez le robot sur la ligne tracée sur le sol pour activer les capteurs. A chaque fois qu’un des capteurs est activé, déclenchez l’action correspondante :
- Capteur IR gauche : pivoter à gauche
- Capteur IR centre gauche : tourner légèrement à gauche
- Capteur IR central : aller tout droit
- Capteur IR centre droit : tourner légèrement à droite
- Capteur IR droite : pivoter à droite
- Aucun capteur ne s'active : reculer
Nous vous conseillons de donner plusieurs exemples pour chaque situation.
Test de l’apprentissage
Une fois que le réseau de neurones est configuré, observons si le robot réussit à suivre la ligne !
Placez-le en début de parcours, activez l’autonomie et regardez comme il se débrouille.
Vous pouvez ensuite complexifier la piste en y ajoutant des intersections afin de créer de nouvelles difficultés pour les robots !
Bilan et retours d'expérience
Grâce à un réseau de neurones très simple et très peu de données d’entraînement, le robot a réussi à suivre la ligne.
On peut observer sur le logiciel le poids accordé à chaque connexion, et comprendre la manière dont le robot prend ses décisions : en fonction du capteur qui est activé (ou non), l’algorithme attribue des préférences à chacune des actions à choisir : le robot sélectionne l’action avec la préférence la plus forte.
Votre robot est sorti de piste ou a choisi la mauvaise action ? Essayez de comprendre pourquoi ! Quelques suggestions :
- il y a un biais : vous avez fait une erreur dans l’entraînement du robot
- plusieurs capteurs se sont activés en même temps, par exemple à un croisement : le robot a-t-il été entraîné à réagir à cette situation ?
- l’angle d’une courbe de la ligne au sol est trop abrupt
- la vitesse du robot est trop forte