Entdecken Sie unsere Lehrmaterialien



Benötigtes Material :
- mindestens 1 Roboter
- 1 Computer/Roboter
- Flache Oberfläche mit heller Farbe
- Schwarzes Klebeband
Software-Einstellungen :
"Linienverfolgung" in der manuellen Bearbeitung (Verbindungen direkt in der Software erstellen) oder im betreuten Lernen (Roboter auf der Strecke trainieren)
Dauer :
30 Minuten bis 2 Stunden
Alter :
10 Jahre und älter
Die + dieser Aktivität :
- Wenig Material erforderlich
- Sehr einfach und schnell zu machen
- Sehr leicht verständliches neuronales Netzwerk
Diese Aktivität wird mit jedem Roboter einzeln durchgeführt. Wir werden dem Roboter beibringen, einer Spur auf dem Boden zu folgen, ohne dass er dabei Fehler macht!
Die Schüler und Schülerinnen lernen, dass der Erfolg des überwachten Lernens eher von der Qualität und Vollständigkeit der Trainingsdaten des Roboters als von ihrer Quantität abhängt. Sie werden das Prinzip eines künstlichen neuronalen Netzes sehr leicht verstehen können, da das in dieser Aktivität verwendete Netz sehr einfach und lesbar ist (5 Eingänge, 5 oder 6 Ausgänge).
[Videoinhalt folgt]
Einführung
Zeichnen Sie auf einer ebenen, einfarbigen, hellen Fläche mithilfe eines schwarzen Klebebands (wird mit den Arenen geliefert) einen Parcours ein.
Wenn du dein eigenes Material verwenden möchtest, achte darauf, dass der Roboter den Kontrast zwischen dem Boden und der Linie wahrnimmt.
Die klassische Form ist eine "8", aber lassen Sie Ihrer Fantasie freien Lauf!
Achten Sie jedoch darauf, immer sanfte Kurven zu schaffen, um den Roboter nicht zu verwirren.
Einstellungen (Verbindung)
Schließen Sie den Roboter an einen Computer an (siehe Abschnitt Verbindung mit dem Roboter falls erforderlich) und wählen Sie dann die Beispielkonfiguration "Linienverfolgung" in manueller Bearbeitung oder im überwachten Lernen aus oder erstellen Sie Ihre eigenen Einstellungen.
Stellen Sie sicher, dass der Roboter eine Geschwindigkeit von 20 oder weniger hat, indem Sie den Schieberegler am unteren Bildschirmrand verwenden.
Training
Wenn Sie sich in der manuellen Bearbeitung befinden :
Stellen Sie sicher, dass die Schaltflächen "Eigenständig" und "Lernen" deaktiviert sind und dass die Schaltfläche "Manuelle Bearbeitung" aktiviert ist.
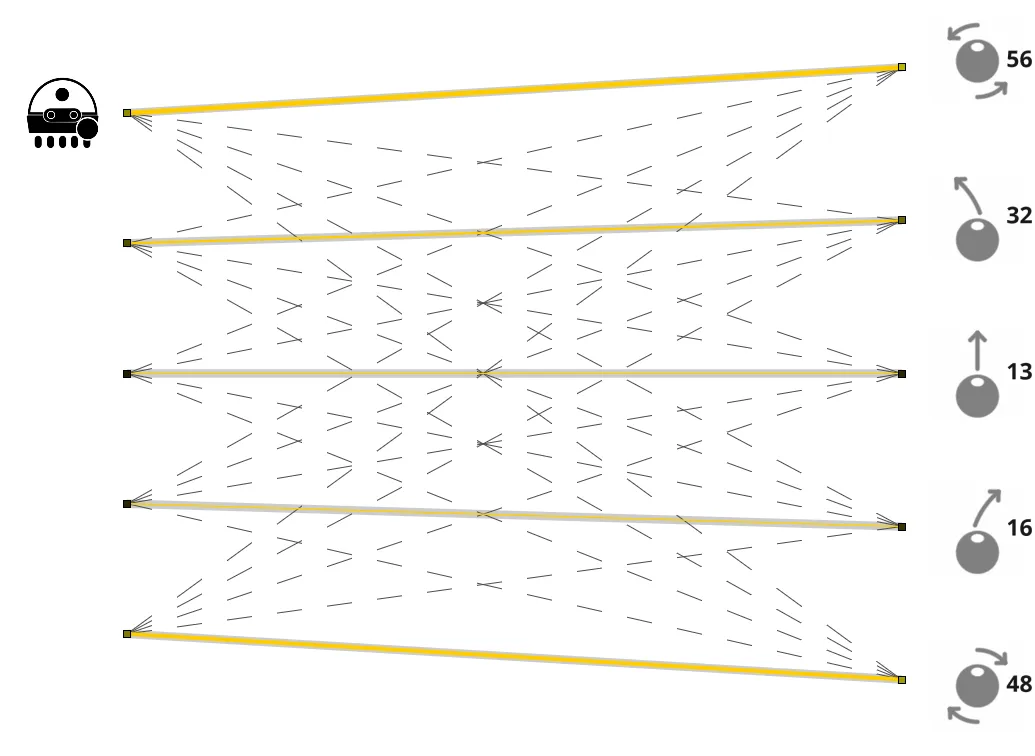
Klicken Sie auf die Verbindungen zwischen den Neuronen für Eingabe (Infrarotsensoren) und Ausgabe (Roboteraktion), um eine Verbindung zu erstellen. Wir empfehlen Ihnen, die folgenden Verbindungen zu erstellen:
- Linker IR-Sensor: nach links schwenken
- IR-Sensor Mitte links: leicht nach links drehen
- Zentraler IR-Sensor: Geradeaus gehen
- IR-Sensor Mitte rechts: leicht nach rechts drehen
- IR-Sensor rechts: nach rechts schwenken
So sollte Ihr neuronales Netz dann aussehen:
Wenn Sie sich im betreuten Lernen befinden :
Überprüfen Sie, ob die Schaltfläche "eigenständig" deaktiviert und die Schaltfläche "lernen" angekreuzt ist.
Platzieren Sie den Roboter auf der auf dem Boden gezogenen Linie, um die Sensoren zu aktivieren. Jedes Mal, wenn einer der Sensoren aktiviert wird, lösen Sie die entsprechende Aktion aus :
- Linker IR-Sensor: nach links schwenken
- IR-Sensor Mitte links: leicht nach links drehen
- Zentraler IR-Sensor: Geradeaus gehen
- IR-Sensor Mitte rechts: leicht nach rechts drehen
- IR-Sensor rechts: nach rechts schwenken
- Kein Sensor wird aktiviert: zurück
Wir empfehlen Ihnen, für jede Situation mehrere Beispiele zu nennen.
Test des Lernens
Sobald das neuronale Netz eingerichtet ist, wollen wir beobachten, ob es dem Roboter gelingt, der Linie zu folgen!
Setzen Sie ihn an den Anfang des Kurses, aktivieren Sie die Selbstständigkeit und beobachten Sie, wie er sich macht.
Anschließend können Sie die Strecke durch das Hinzufügen von Kreuzungen komplexer gestalten, um neue Herausforderungen für die Roboter zu schaffen!
Bilanz und Feedback
Mithilfe eines sehr einfachen neuronalen Netzes und sehr wenigen Trainingsdaten gelang es dem Roboter, der Linie zu folgen.
Man kann in der Software die Gewichtung der einzelnen Verbindungen beobachten und verstehen, wie der Roboter seine Entscheidungen trifft: Je nachdem, welcher Sensor aktiviert ist (oder nicht), weist der Algorithmus jeder der zu wählenden Aktionen eine Präferenz zu: Der Roboter wählt die Aktion mit der höchsten Präferenz.
Ist Ihr Roboter von der Spur abgekommen oder hat er die falsche Aktion gewählt? Versuchen Sie, den Grund dafür herauszufinden! Einige Vorschläge :
- es gibt einen Bias: Sie haben einen Fehler beim Training des Roboters gemacht
- mehrere Sensoren gleichzeitig aktiviert wurden, z. B. an einer Kreuzung: Wurde der Roboter darauf trainiert, auf diese Situation zu reagieren?
- der Winkel einer Kurve der Linie am Boden zu steil ist
- die Geschwindigkeit des Roboters zu hoch ist