Entdecken Sie unsere Lehrmaterialien


Benötigtes Material :
- mindestens 1 Roboter
- 1 Computer/Roboter
- ein flacher Gegenstand (Schachtel, Brett, Smartphone...)
Software-Konfiguration :
- Beispielkonfiguration: "Eindringlingserkennung".
Dauer :
2 Stunden
Alter :
15 Jahre und älter
Die + dieser Aktivität :
- Ideal für den Einsatz in der Klasse
- Wenig Material erforderlich
- Fächerübergreifend (Mathematik/Informatik)
Mathematisches Verständnis von neuronalen Netzen anhand einer Aktivität, die auf dem Ultraschallsensor des Roboters basiert. Dabei wird u. a. herausgefunden, warum man Schichten von Zwischenneuronen benötigt.
[Videoinhalt folgt]
Einsetzen
Stellen Sie den Roboter neben den Computer, mit dem Gesicht zu einer Wand (oder einem Arena-Brett) in etwa 50 cm Entfernung, und halten Sie einen Gegenstand mit einer flachen Seite (eine Kiste, ein Brett, ein Smartphone) bereit, der die Rolle des Eindringlings übernimmt.
Laden Sie die Konfiguration „Einbruchserkennung“ in der Kategorie„Manuelle Bearbeitung“. Dieses Szenario verwendet ausschließlich den Ultraschallsensor.
Die gesamte Aktivität wird im Modus"Manuelle Bearbeitung" durchgeführt, d. h. Sie werden die Parameter des neuronalen Netzes selbst wählen, ohne auf einen Lernalgorithmus zurückzugreifen.
Überblick über die Schnittstelle
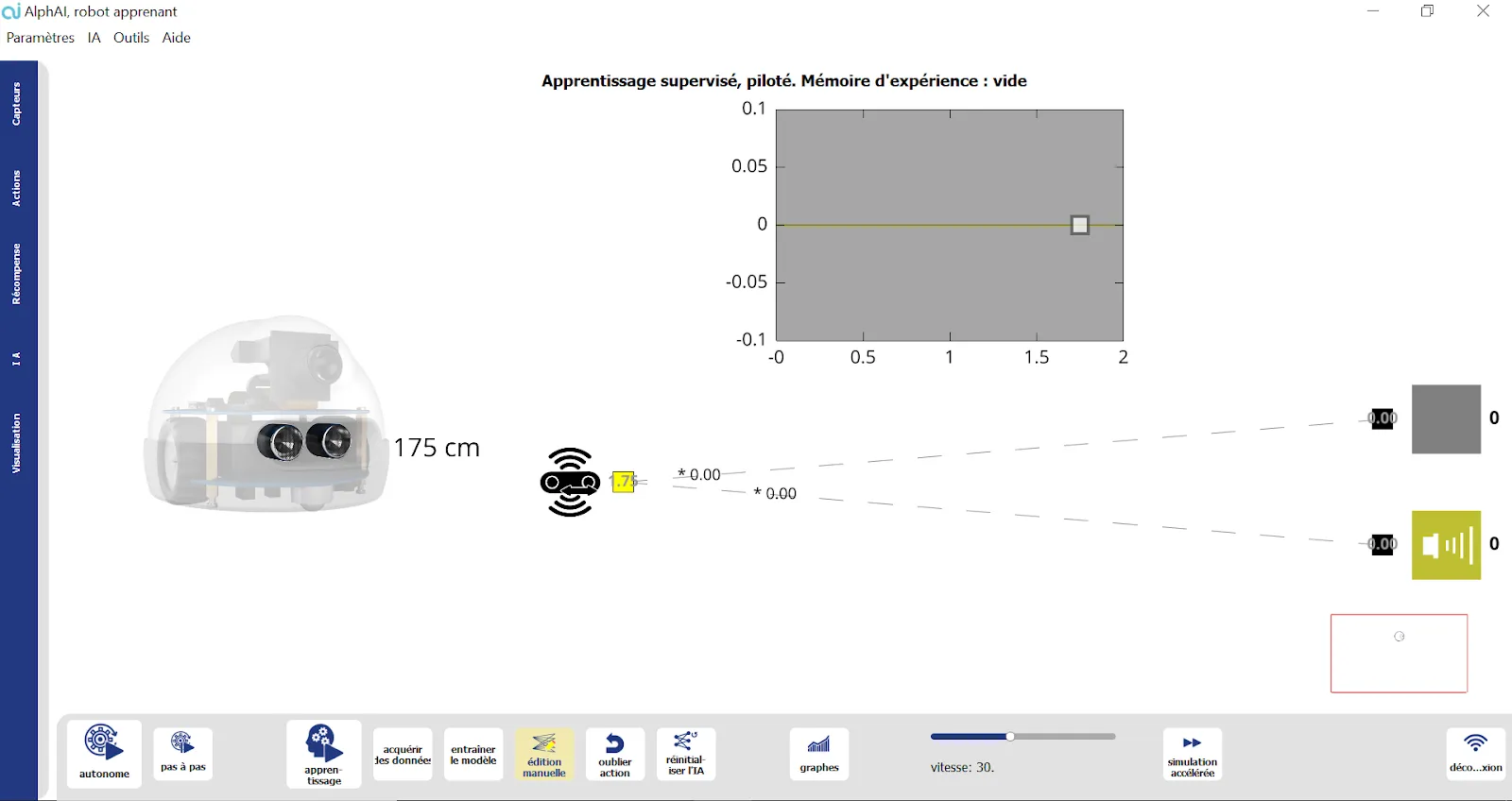
In dieser Aktivität enthält Ihr Hauptbildschirm zwei Visualisierungen:
- Unten ist das untersuchte neuronale Netz zu sehen. Zu Beginn der Aktivität sollte der Modus Manuelle Bearbeitung (in den Schaltflächen unten auf Ihrer Softwareoberfläche) aktiviert sein, der es Ihnen ermöglicht, die Einstellungen des neuronalen Netzes selbst zu ändern. Um den Wert einer Verbindung zu ändern, bewegen Sie Ihre Maus über diese Verbindung (sie wird rot) und geben Sie dann über die Tastatur den gewünschten Wert ein oder ändern Sie mit dem Mausrad den aktuellen Wert. Um den Bias-Wert eines Neurons zu ändern, bewegen Sie Ihre Maus über das Neuron selbst (nicht die Wertanzeige) und verfahren dann wie bei den Verbindungen.
- Oben ein Diagramm, das denZustandsraum darstellt. Auf der Abszisse die vom Ultraschallsensor gemessene Entfernung. Auf der Ordinate die Aktivierungsniveaus der Ausgangsneuronen. Es werden zwei Kurven dargestellt, da es zwei Ausgangsneuronen gibt. Die Zuordnung Kurve/Neuron wird durch einen Farbcode angezeigt. Der Wert der Ausgabeneuronen ist eine Funktion des Eingabewerts (der Entfernung). Die Hintergrundfarbe des Diagramms zeigt an, welche Kurve für jeden Eingabewert über der anderen liegt, und somit, welche Aktion der Roboter für diesen Eingabewert wählen wird.
Zielund Problemstellung
Der Roboter steht vor einer Wand und muss piepen, wenn jemand (ein Eindringling) zwischen ihm und der Wand hindurchgeht.
Das neuronale Netz muss so konfiguriert werden, dass es diese Aufgabe erfüllt. Da der einzige verwendete Sensor der Ultraschallsensor ist, besteht das Ziel darin, bei geringem Abstand einen Piepton zu erzeugen und bei normalem Abstand die Aktion "nichts tun" auszulösen.

Integration von neuronalen Bias
Die einfachen Einstellungen "Verbindungsgewicht" reichen nicht aus, um diese Aufgabe zu erfüllen. Wir müssen die Option "Neuronaler Bias" (auf der Registerkarte KI) aktivieren, dadurch werden neue Parameter freigeschaltet, mit denen wir dieses Ziel erreichen können.



Versuch zu betrügen
Problematik
Ein Eindringling versucht zu schummeln, indem er die Eigenschaften des Ultraschallsensors ausnutzt: Wenn die flache Seite diagonal zum Sensor platziert wird, prallen die Wellen ab und die erfasste Entfernung ist dann viel größer als die Entfernung zur Wand! Wir müssen unser neuronales Netz anpassen, um auch diesen Betrugsversuch zu erkennen.
Neuronale Zwischenschichten
Dazu müssen wir unserem neuronalen Netz eine Zwischenschicht hinzufügen (auf der Registerkarte KI), um mithilfe der Aktivierungsfunktionen ein nichtlineares Modell zu erhalten.

Bilanz und Feedback
Merken:
- Ein neuronales Netz ist ein Satz von Neuronen, der in Schichten organisiert ist. Jede Schicht kann ein oder mehrere Neuronen enthalten.
- Neuronen sind abstrakte Objekte, die einen einfachen numerischen Wert enthalten.
- Neuronen werden durch Verbindungen miteinander verknüpft, deren Werte als Gewichte bezeichnet werden.
- Jedes Neuron hat außerdem einen Bias, der zum Wert des Neurons hinzugefügt wird.
- Die Werte der Neuronen in der Eingabeschicht werden durch die Werte der Sensoren bestimmt.
- Die Neuronen in der Ausgabeschicht entsprechen den Aktionen des Roboters. Im autonomen Modus wird immer die Aktion mit dem höchsten Wert ausgewählt.
- Die Zwischenschichten ermöglichen es dem Netz, komplexere Aufgaben zu erfüllen. In der Grafik ist zu erkennen, dass die Geraden der Ausgabeneuronen durch immer komplexere Kurven ersetzt werden, wenn die Anzahl der Zwischenschichten erhöht wird.
- Ein neuronales Netz zu trainieren bedeutet einfach, einen Wert für jeden seiner Parameter auszuwählen: Gewicht der Verbindungen und Bias der Neuronen. Wenn die Anzahl der Neuronen und Verbindungen groß wird, wird diese komplexe Aufgabe von einem Lernalgorithmus übernommen!