Découvrez nos
ressources


Matériel :
- Robots AlphAI
- 1 PC / robot
- Arène
Points forts :
- Tour d'horizon global de la robotique et de l'IA
- Clarifie les différentes notions (IA ≠ programmation ; apprentissage supervisé ≠ par renforcement)
Durée :
3 heures
Age :
À partir de 10 ans
Configurations :
Les 4 manipulations utilisent des configurations déjà existantes dans le logiciel
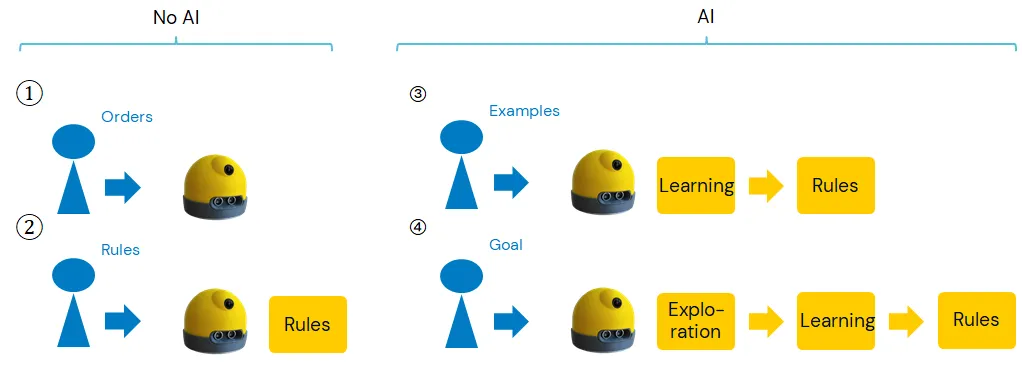
Cette séquence pédagogique de 4 manipulations permet de bien comprendre les différentes manières de contrôler une machine, du téléguidage (absence totale d'auonomie de la machine) à l'Apprentissage par Renforcement (apprentissage "seul" de la machine). Mais nous montrons que quel que soit le niveau, c'est l'humain qui reste le maître de la machine, car lui seul peut lui fixer un but.
On expliquera clairement également la différence entre ce qui est appelé aujourd'hui "Intelligence Artificielle", à savoir les systèmes où il y a un apprentissage de la part de la machine (niveaux 3 et 4), par différence avec la programmation déterministe (niveau 2).
Les diapositives support illustrent les manipulations par de petits films, et pour chacune d'entre elles proposent un shéma récapitulatif.
Ces 4 manipulations sont :
1. Téléguidage : l'utilisateur charge la configuration "téléguidage" puis choisit les actions que va faire le robot. Il se familiarise également avec le logiciel. Le robot n'a aucune autonomie puisqu'à tout moment c'est l'humain qui choisit ses actions.
2. Programmation : l'utilisateur charge la configuration "bloqué versus mouvement", et doit alors décider des règles de décision du robot selon que ses capteurs mesurent qu'il est bloqué ou non bloqué (il faut sélectionner les connexions à mettre en place dans ce qu'il s'avère être un mini réseau de neurones artificiels). L'utilisateur règle le programme puis appuie sur le bouton "Autonome" pour le tester. Des affichages "Récompense" et "Niveau" affichent des valeurs d'autant plus haute que le robot avance sans se bloquer : l'activité peut être présentée comme un jeu où il faut maximiser le niveau que va atteindre le robot (NB : le "niveau" est la moyenne des "récompenses" obtenues en une minute ; on retrouvera cette notion de récompense au niveau 4 "apprentissage par renforcement"). En faisant cette activité, l'utilisateur a "programmé" le robot : le robot peut ensuite fonctionner en autonomie, mais en exécutant à tout moment ce qui a été prévu. On pourra répéter l'activité avec d'autres configurations de la catégorie "Édition Manuelle", qui vont en difficulté croissante. On pourra aussi insister sur la nécessité, pour un robot d'être autonome, qu'il dispose de capteurs.
3. Apprentissage Supervisé : les utilisateurs chargent la configuration "course de robot" et entraînent leurs robots pour circuler dans un circuit. Voir l'activité course de robots pour plus de détails. La grande différence avec le niveau précédent "programmation" est que l'utilisateur ne fixe plus directement les règles de calcul pour analyser les données capteurs ; au contraire il fournit simplement des exemples à partir desquels l'IA trouve toute seule ("apprend") les règles qu'elle doit utiliser.
4. Apprentissage par Renforcement : les utilisateurs chargent la configuration "apprentissage supervisé - évitement d'obstacle" et appuient juste sur la touche "Autonome". Les robots se mettent à apprendre, non plus à partir d'exemples fourni par l'humain, mais à partir de leurs propres expériences, qu'ils accumulent en menant leurs propres "explorations", c'est à dire par essais et erreurs. On retrouve l'affichage de la récompense (et le niveau, qui calcule une récompense moyenne) : c'est cette récompense que l'IA cherche à maximiser, la récompense ne fait pas partie de l'IA, c'est un programme auxiliaire qui analyse les mouvements et blocages du robot. L'humain n'est donc pas absent de la boucle, car c'est lui qui a décidé du mode de récompense, pour pouvoir entraîner l'IA au comportement que lui a décidé. Plus de détails sur ce niveau dans l'activité évitement d'obstacle.