Entdecken Sie unsere Lehrmaterialien


Material :
- AlphAI-Roboter
- 1 PC / Roboter
- Arena
Stärken:
- Globaler Überblick über Robotik und KI
- Klarstellt die verschiedenen Begriffe (KI ≠ Programmierung; überwachtes Lernen ≠ Reinforcement Learning)
Dauer :
3 Stunden
Alter :
Ab 10 Jahren
Konfigurationen:
Die 4 Manipulationen verwenden bereits in der Software vorhandene Konfigurationen.
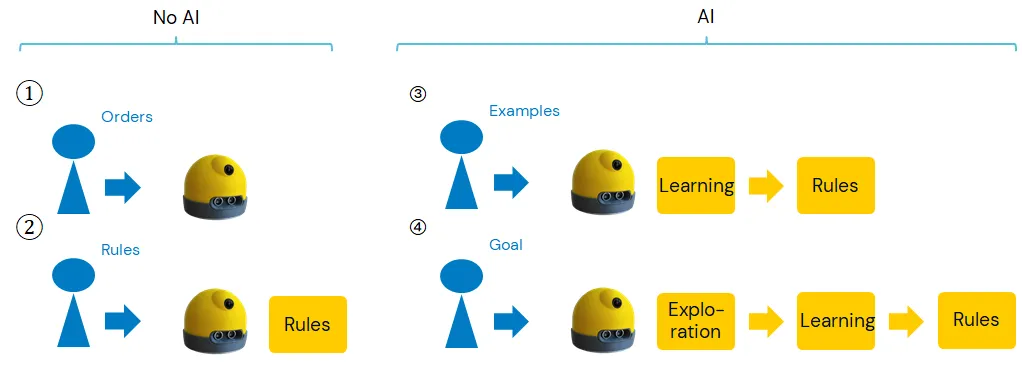
Diese pädagogische Sequenz mit vier Manipulationen vermittelt ein gutes Verständnis für die verschiedenen Arten der Maschinensteuerung, von der Fernsteuerung (völlige Unabhängigkeit der Maschine) bis zum Reinforcement Learning (selbstständiges Lernen der Maschine). Wir zeigen jedoch, dass unabhängig vom Niveau der Mensch der Herr über die Maschine bleibt, da nur er ihr ein Ziel vorgeben kann.
Wir werden auch den Unterschied zwischen dem, was heute als „Künstliche Intelligenz” bezeichnet wird, d. h. Systeme, bei denen die Maschine lernt (Stufen 3 und 4), und der deterministischen Programmierung (Stufe 2) klar erläutern.
Die Folien veranschaulichen die Handgriffe anhand kleiner Filme und bieten für jeden einzelnen eine zusammenfassende Skizze.
Diese 4 Handgriffe sind:
1. Fernsteuerung: Der Benutzer lädt die Konfiguration „Fernsteuerung” und wählt dann die Aktionen aus, die der Roboter ausführen soll. Dabei macht er sich auch mit der Software vertraut. Der Roboter verfügt über keinerlei Autonomie, da seine Aktionen jederzeit vom Menschen bestimmt werden.
2. Programmierung: Der Benutzer lädt die Konfiguration „blockiert versus Bewegung” und muss dann die Entscheidungsregeln des Roboters festlegen, je nachdem, ob seine Sensoren messen, dass er blockiert oder nicht blockiert ist (es müssen die Verbindungen ausgewählt werden, die in einem Mini-Netzwerk künstlicher Neuronen hergestellt werden sollen). Der Benutzer stellt das Programm ein und drückt dann die Taste „Autonom”, um es zu testen. Die Anzeigen „Belohnung” und „Level” zeigen Werte an, die umso höher sind, je weiter der Roboter ohne Blockierung vorankommt: Die Aktivität kann als Spiel dargestellt werden, bei dem es darum geht, das vom Roboter erreichte Level zu maximieren (Anmerkung: Das „Level” ist der Durchschnitt der in einer Minute erzielten „Belohnungen”; dieser Begriff der Belohnung wird in Level 4 „Lernen durch Reinforcement Learning” wieder aufgegriffen).. Mit dieser Aktivität hat der Benutzer den Roboter „programmiert”: Der Roboter kann dann autonom arbeiten, führt jedoch jederzeit das aus, was vorgesehen wurde. Die Aktivität kann mit anderen Konfigurationen der Kategorie „Manuelle Bearbeitung” wiederholt werden, deren Schwierigkeitsgrad zunimmt. Es kann auch betont werden, dass ein Roboter, um autonom zu sein, über Sensoren verfügen muss.
3. Überwachtes Lernen: Die Benutzer laden die Konfiguration „Roboterrennen” und trainieren ihre Roboter, damit sie auf einer Rennstrecke fahren können. Weitere Informationen finden Sie unter der Aktivität „Roboterrennen ”. Der große Unterschied zur vorherigen Stufe „Programmierung” besteht darin, dass der Benutzer die Berechnungsregeln für die Analyse der Sensordaten nicht mehr direkt festlegt, sondern lediglich Beispiele bereitstellt, anhand derer die KI selbstständig die zu verwendenden Regeln findet („lernt”).
4. Lernen durch Reinforcement Learning: Die Benutzer laden die Konfiguration „überwachtes Lernen – Hindernisvermeidung” und drücken einfach die Taste „Autonom”. Die Roboter beginnen zu lernen, nicht mehr anhand von Beispielen, die ihnen von Menschen gegeben werden, sondern anhand ihrer eigenen Erfahrungen, die sie bei ihren eigenen „Erkundungen”, also durch Try and Error, sammeln. Die Belohnung ( und das Level, das eine durchschnittliche Belohnung berechnet) wird angezeigt: Diese Belohnung versucht die KI zu maximieren. Die Belohnung ist nicht Teil der KI, sondern ein Hilfsprogramm, das die Bewegungen und Blockaden des Roboters analysiert. Der Mensch ist also nicht aus dem Kreislauf ausgeschlossen, denn er hat die Art der Belohnung festgelegt, um die KI zu dem von ihm gewünschten Verhalten zu trainieren. Weitere Details zu dieser Stufe finden Sie in der Aktivität „Hindernisvermeidung”.